#include <mlf_track_data.h>
Collaboration diagram for apollo::perception::lidar::MlfPredict:
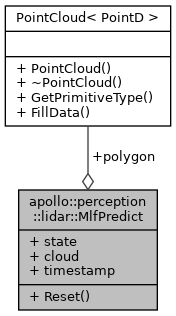
Public Member Functions | |
| void | Reset () |
Public Attributes | |
| EIGEN_MAKE_ALIGNED_OPERATOR_NEW Eigen::VectorXf | state |
| base::PolygonDType | polygon |
| base::PointDCloud | cloud |
| double | timestamp |
Member Function Documentation
◆ Reset()
|
inline |
Member Data Documentation
◆ cloud
| base::PointDCloud apollo::perception::lidar::MlfPredict::cloud |
◆ polygon
| base::PolygonDType apollo::perception::lidar::MlfPredict::polygon |
◆ state
| EIGEN_MAKE_ALIGNED_OPERATOR_NEW Eigen::VectorXf apollo::perception::lidar::MlfPredict::state |
◆ timestamp
| double apollo::perception::lidar::MlfPredict::timestamp |
The documentation for this struct was generated from the following file:
- modules/perception/lidar/lib/tracker/common/mlf_track_data.h
