#include <obj_mapper.h>
◆ ObjMapper()
| apollo::perception::camera::ObjMapper::ObjMapper |
( |
| ) |
|
|
inline |
◆ ~ObjMapper()
| apollo::perception::camera::ObjMapper::~ObjMapper |
( |
| ) |
|
|
inline |
◆ get_orientation_var()
| Eigen::Vector3d apollo::perception::camera::ObjMapper::get_orientation_var |
( |
| ) |
|
|
inline |
◆ get_position_uncertainty()
| Eigen::Matrix3d apollo::perception::camera::ObjMapper::get_position_uncertainty |
( |
| ) |
|
|
inline |
◆ get_ry_score() [1/2]
| std::vector<float> apollo::perception::camera::ObjMapper::get_ry_score |
( |
| ) |
|
|
inline |
◆ get_ry_score() [2/2]
| std::vector<float> apollo::perception::camera::ObjMapper::get_ry_score |
( |
float |
ry | ) |
|
|
inline |
◆ Init()
| void apollo::perception::camera::ObjMapper::Init |
( |
const float * |
k_mat, |
|
|
int |
width, |
|
|
int |
height |
|
) |
| |
|
inline |
◆ resize_ry_score()
| void apollo::perception::camera::ObjMapper::resize_ry_score |
( |
int |
size | ) |
|
|
inline |
◆ set_default_variance()
| void apollo::perception::camera::ObjMapper::set_default_variance |
( |
| ) |
|
|
inline |
◆ Solve3dBbox()
| bool apollo::perception::camera::ObjMapper::Solve3dBbox |
( |
const ObjMapperOptions & |
options, |
|
|
float |
center[3], |
|
|
float |
hwl[3], |
|
|
float * |
ry |
|
) |
| |
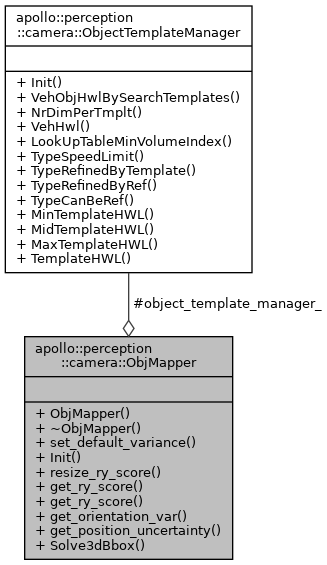
◆ object_template_manager_
The documentation for this class was generated from the following file:
- modules/perception/camera/lib/obstacle/transformer/multicue/obj_mapper.h