#include <similar.h>
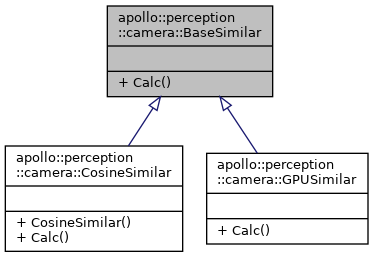
Inheritance diagram for apollo::perception::camera::BaseSimilar:
Collaboration diagram for apollo::perception::camera::BaseSimilar:
Public Member Functions | |
| virtual bool | Calc (CameraFrame *frame1, CameraFrame *frame2, base::Blob< float > *sim)=0 |
Member Function Documentation
◆ Calc()
|
pure virtual |
Implemented in apollo::perception::camera::GPUSimilar, and apollo::perception::camera::CosineSimilar.
The documentation for this class was generated from the following file:
- modules/perception/camera/lib/obstacle/tracker/common/similar.h
