#include <ndt_solver.h>
Public Types | |
| typedef boost::shared_ptr< NormalDistributionsTransform< PointSource, PointTarget > > | Ptr |
| Typedef shared pointer. More... | |
| typedef boost::shared_ptr< const NormalDistributionsTransform< PointSource, PointTarget > > | ConstPtr |
Public Member Functions | |
| NormalDistributionsTransform () | |
| Constructor. More... | |
| ~NormalDistributionsTransform () | |
| Destructor. More... | |
| void | SetInputTarget (const std::vector< Leaf > &cell_leaf, const PointCloudTargetConstPtr &cloud) |
| Provide a pointer to the input target. More... | |
| void | SetInputSource (const PointCloudTargetConstPtr &cloud) |
| Provide a pointer to the input target. More... | |
| void | SetResolution (float resolution) |
| Set/change the voxel grid resolution. More... | |
| float | GetResolution () const |
| Get voxel grid resolution. More... | |
| double | GetStepSize () const |
| Get the newton line search maximum step length. More... | |
| void | SetStepSize (double step_size) |
| Set/change the newton line search maximum step length. More... | |
| double | GetOulierRatio () const |
| Get the point cloud outlier ratio. More... | |
| void | SetOulierRatio (double outlier_ratio) |
| Set/change the point cloud outlier ratio. More... | |
| double | GetTransformationProbability () const |
| Get the registration alignment probability. More... | |
| int | GetFinalNumIteration () const |
| Get the number of iterations required to calculate alignment. More... | |
| bool | HasConverged () const |
| Return the state of convergence after the last align run. More... | |
| Eigen::Matrix4f | GetFinalTransformation () const |
| Get the final transformation matrix estimated by the registration method. More... | |
| void | SetMaximumIterations (int nr_iterations) |
| Set the maximum number of iterations the internal optimization should run for. More... | |
| void | SetTransformationEpsilon (double epsilon) |
| Set the transformation epsilon (maximum allowable difference between two consecutive transformations. More... | |
| void | GetGridPointCloud (pcl::PointCloud< pcl::PointXYZ > *cell_cloud) |
| Obtain probability point cloud. More... | |
| void | SetLeftTopCorner (const Eigen::Vector3d &left_top_corner) |
| Set left top corner of target point cloud. More... | |
| double | GetFitnessScore (double max_range=std::numeric_limits< double >::max()) |
| Obtain the Euclidean fitness score. More... | |
| void | Align (PointCloudSourcePtr output, const Eigen::Matrix4f &guess) |
| Call the registration algorithm which estimates the transformation and returns the transformed source. More... | |
Static Public Member Functions | |
| static void | ConvertTransform (const Eigen::Matrix< double, 6, 1 > &x, Eigen::Affine3f *trans) |
| Convert 6 element transformation vector to affine transformation. More... | |
| static void | ConvertTransform (const Eigen::Matrix< double, 6, 1 > &x, Eigen::Matrix4f *trans) |
| Convert 6 element transformation vector to transformation matrix. More... | |
Protected Types | |
| typedef pcl::PointCloud< PointSource > | PointCloudSource |
| Typename of source point. More... | |
| typedef boost::shared_ptr< PointCloudSource > | PointCloudSourcePtr |
| typedef boost::shared_ptr< const PointCloudSource > | PointCloudSourceConstPtr |
| typedef pcl::PointCloud< PointTarget > | PointCloudTarget |
| Typename of target point. More... | |
| typedef boost::shared_ptr< const PointCloudTarget > | PointCloudTargetConstPtr |
| typedef VoxelGridCovariance< PointTarget > | TargetGrid |
| Typename of searchable voxel grid containing mean and covariance. More... | |
| typedef TargetGrid * | TargetGridPtr |
| typedef const TargetGrid * | TargetGridConstPtr |
| typedef LeafConstPtr | TargetGridLeafConstPtr |
| typedef pcl::search::KdTree< PointTarget > | KdTree |
| Typename of KD-Tree. More... | |
| typedef pcl::search::KdTree< PointTarget >::Ptr | KdTreePtr |
Protected Member Functions | |
| void | ComputeTransformation (PointCloudSourcePtr output) |
| Estimate the transformation and returns the transformed source (input) as output. More... | |
| void | ComputeTransformation (PointCloudSourcePtr output, const Eigen::Matrix4f &guess) |
| Estimate the transformation and returns the transformed source (input) as output. More... | |
| double | ComputeDerivatives (Eigen::Matrix< double, 6, 1 > *score_gradient, Eigen::Matrix< double, 6, 6 > *hessian, PointCloudSourcePtr trans_cloud, Eigen::Matrix< double, 6, 1 > *p, bool ComputeHessian=true) |
| Compute derivatives of probability function w.r.t. the transformation vector. More... | |
| double | UpdateDerivatives (Eigen::Matrix< double, 6, 1 > *score_gradient, Eigen::Matrix< double, 6, 6 > *hessian, const Eigen::Vector3d &x_trans, const Eigen::Matrix3d &c_inv, bool ComputeHessian=true) |
| Compute individual point contributions to derivatives of probability function w.r.t. the transformation vector. More... | |
| void | ComputeAngleDerivatives (const Eigen::Matrix< double, 6, 1 > &p, bool ComputeHessian=true) |
| Precompute anglular components of derivatives. More... | |
| void | ComputePointDerivatives (const Eigen::Vector3d &x, bool ComputeHessian=true) |
| Compute point derivatives. More... | |
| void | ComputeHessian (Eigen::Matrix< double, 6, 6 > *hessian, const PointCloudSource &trans_cloud, Eigen::Matrix< double, 6, 1 > *p) |
| Compute hessian of probability function w.r.t. the transformation vector. More... | |
| void | UpdateHessian (Eigen::Matrix< double, 6, 6 > *hessian, const Eigen::Vector3d &x_trans, const Eigen::Matrix3d &c_inv) |
| Compute individual point contributions to hessian of probability function. More... | |
| double | ComputeStepLengthMt (const Eigen::Matrix< double, 6, 1 > &x, Eigen::Matrix< double, 6, 1 > *step_dir, double step_init, double step_max, double step_min, double *score, Eigen::Matrix< double, 6, 1 > *score_gradient, Eigen::Matrix< double, 6, 6 > *hessian, PointCloudSourcePtr trans_cloud) |
| Compute line search step length and update transform and probability derivatives. More... | |
| bool | UpdateIntervalMt (double *a_l, double *f_l, double *g_l, double *a_u, double *f_u, double *g_u, double a_t, double f_t, double g_t) |
| Update interval of possible step lengths for More-Thuente method. More... | |
| double | TrialValueSelectionMt (double a_l, double f_l, double g_l, double a_u, double f_u, double g_u, double a_t, double f_t, double g_t) |
| Select new trial value for More-Thuente method. More... | |
| double | AuxilaryFunctionPsimt (double a, double f_a, double f_0, double g_0, double mu=1.e-4) |
| Auxiliary function used to determine endpoints of More-Thuente interval. More... | |
| double | AuxilaryFunctionDpsimt (double g_a, double g_0, double mu=1.e-4) |
| Auxiliary function derivative used to determine endpoints of More-Thuente interval. More... | |
Protected Attributes | |
| PointCloudTargetConstPtr | target_ |
| A pointer of input target point cloud. More... | |
| KdTreePtr | target_tree_ |
| A pointer to the spatial search object. More... | |
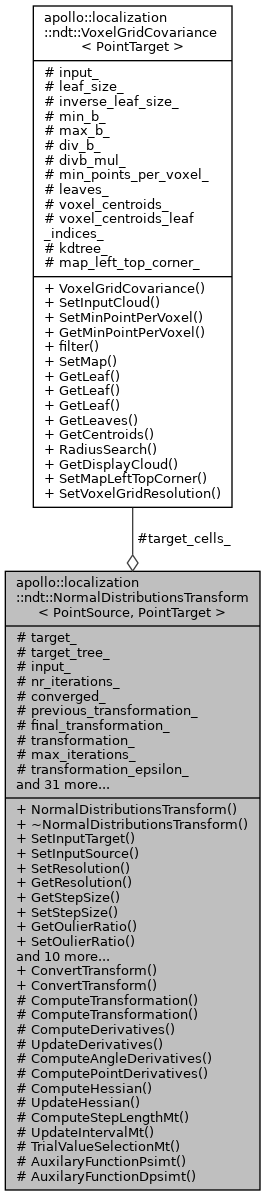
| TargetGrid | target_cells_ |
| The voxel grid generated from target cloud containing point means and covariances. More... | |
| PointCloudSourceConstPtr | input_ |
| A pointer of input source point cloud. More... | |
| int | nr_iterations_ |
| finnal iterations. More... | |
| bool | converged_ |
| Eigen::Matrix4f | previous_transformation_ |
| transformations. More... | |
| Eigen::Matrix4f | final_transformation_ |
| Eigen::Matrix4f | transformation_ |
| int | max_iterations_ |
| max iterations. More... | |
| double | transformation_epsilon_ |
| Transformation epsilon parameter. More... | |
| float | resolution_ |
| The side length of voxels. More... | |
| double | step_size_ |
| The maximum step length. More... | |
| double | outlier_ratio_ |
| The ratio of outliers of points w.r.t. a normal distribution, Equation 6.7 [Magnusson 2009]. More... | |
| double | gauss_d1_ |
| The normalization constants used fit the point distribution to a normal distribution, Equation 6.8 [Magnusson 2009]. More... | |
| double | gauss_d2_ |
| double | trans_probability_ |
| The probability score of the transform applied to the input cloud, Equation 6.9 and 6.10 [Magnusson 2009]. More... | |
| Eigen::Vector3d | j_ang_a_ |
| The precomputed angular derivatives for the jacobian of a transformation vector, Equation 6.19 [Magnusson 2009]. More... | |
| Eigen::Vector3d | j_ang_b_ |
| Eigen::Vector3d | j_ang_c_ |
| Eigen::Vector3d | j_ang_d_ |
| Eigen::Vector3d | j_ang_e_ |
| Eigen::Vector3d | j_ang_f_ |
| Eigen::Vector3d | j_ang_g_ |
| Eigen::Vector3d | j_ang_h_ |
| Eigen::Vector3d | h_ang_a2_ |
| The precomputed angular derivatives for the hessian of a transformation vector, Equation 6.19 [Magnusson 2009]. More... | |
| Eigen::Vector3d | h_ang_a3_ |
| Eigen::Vector3d | h_ang_b2_ |
| Eigen::Vector3d | h_ang_b3_ |
| Eigen::Vector3d | h_ang_c2_ |
| Eigen::Vector3d | h_ang_c3_ |
| Eigen::Vector3d | h_ang_d1_ |
| Eigen::Vector3d | h_ang_d2_ |
| Eigen::Vector3d | h_ang_d3_ |
| Eigen::Vector3d | h_ang_e1_ |
| Eigen::Vector3d | h_ang_e2_ |
| Eigen::Vector3d | h_ang_e3_ |
| Eigen::Vector3d | h_ang_f1_ |
| Eigen::Vector3d | h_ang_f2_ |
| Eigen::Vector3d | h_ang_f3_ |
| Eigen::Matrix< double, 3, 6 > | point_gradient_ |
| The first order derivative of the transformation of a point w.r.t. the transform vector, Equation 6.18 [Magnusson 2009]. More... | |
| Eigen::Matrix< double, 18, 6 > | point_hessian_ |
| The second order derivative of the transformation of a point w.r.t. the transform vector, Equation 6.20 [Magnusson 2009]. More... | |
Member Typedef Documentation
◆ ConstPtr
| typedef boost::shared_ptr< const NormalDistributionsTransform<PointSource, PointTarget> > apollo::localization::ndt::NormalDistributionsTransform< PointSource, PointTarget >::ConstPtr |
◆ KdTree
|
protected |
Typename of KD-Tree.
◆ KdTreePtr
|
protected |
◆ PointCloudSource
|
protected |
Typename of source point.
◆ PointCloudSourceConstPtr
|
protected |
◆ PointCloudSourcePtr
|
protected |
◆ PointCloudTarget
|
protected |
Typename of target point.
◆ PointCloudTargetConstPtr
|
protected |
◆ Ptr
| typedef boost::shared_ptr< NormalDistributionsTransform<PointSource, PointTarget> > apollo::localization::ndt::NormalDistributionsTransform< PointSource, PointTarget >::Ptr |
Typedef shared pointer.
◆ TargetGrid
|
protected |
Typename of searchable voxel grid containing mean and covariance.
◆ TargetGridConstPtr
|
protected |
◆ TargetGridLeafConstPtr
|
protected |
◆ TargetGridPtr
|
protected |
Constructor & Destructor Documentation
◆ NormalDistributionsTransform()
| apollo::localization::ndt::NormalDistributionsTransform< PointSource, PointTarget >::NormalDistributionsTransform | ( | ) |
Constructor.
◆ ~NormalDistributionsTransform()
|
inline |
Destructor.
Member Function Documentation
◆ Align()
| void apollo::localization::ndt::NormalDistributionsTransform< PointSource, PointTarget >::Align | ( | PointCloudSourcePtr | output, |
| const Eigen::Matrix4f & | guess | ||
| ) |
Call the registration algorithm which estimates the transformation and returns the transformed source.
◆ AuxilaryFunctionDpsimt()
|
inlineprotected |
Auxiliary function derivative used to determine endpoints of More-Thuente interval.
◆ AuxilaryFunctionPsimt()
|
inlineprotected |
Auxiliary function used to determine endpoints of More-Thuente interval.
◆ ComputeAngleDerivatives()
|
protected |
Precompute anglular components of derivatives.
◆ ComputeDerivatives()
|
protected |
Compute derivatives of probability function w.r.t. the transformation vector.
◆ ComputeHessian()
|
protected |
Compute hessian of probability function w.r.t. the transformation vector.
◆ ComputePointDerivatives()
|
protected |
Compute point derivatives.
◆ ComputeStepLengthMt()
|
protected |
Compute line search step length and update transform and probability derivatives.
◆ ComputeTransformation() [1/2]
|
inlineprotected |
Estimate the transformation and returns the transformed source (input) as output.
◆ ComputeTransformation() [2/2]
|
protected |
Estimate the transformation and returns the transformed source (input) as output.
◆ ConvertTransform() [1/2]
|
inlinestatic |
Convert 6 element transformation vector to affine transformation.
◆ ConvertTransform() [2/2]
|
inlinestatic |
Convert 6 element transformation vector to transformation matrix.
◆ GetFinalNumIteration()
|
inline |
Get the number of iterations required to calculate alignment.
◆ GetFinalTransformation()
|
inline |
Get the final transformation matrix estimated by the registration method.
◆ GetFitnessScore()
| double apollo::localization::ndt::NormalDistributionsTransform< PointSource, PointTarget >::GetFitnessScore | ( | double | max_range = std::numeric_limits< double >::max() | ) |
Obtain the Euclidean fitness score.
◆ GetGridPointCloud()
|
inline |
Obtain probability point cloud.
◆ GetOulierRatio()
|
inline |
Get the point cloud outlier ratio.
◆ GetResolution()
|
inline |
Get voxel grid resolution.
◆ GetStepSize()
|
inline |
Get the newton line search maximum step length.
- Returns
- maximum step length
◆ GetTransformationProbability()
|
inline |
Get the registration alignment probability.
◆ HasConverged()
|
inline |
Return the state of convergence after the last align run.
◆ SetInputSource()
|
inline |
Provide a pointer to the input target.
◆ SetInputTarget()
|
inline |
Provide a pointer to the input target.
◆ SetLeftTopCorner()
|
inline |
Set left top corner of target point cloud.
◆ SetMaximumIterations()
|
inline |
Set the maximum number of iterations the internal optimization should run for.
◆ SetOulierRatio()
|
inline |
Set/change the point cloud outlier ratio.
◆ SetResolution()
|
inline |
Set/change the voxel grid resolution.
◆ SetStepSize()
|
inline |
Set/change the newton line search maximum step length.
- Parameters
-
[in] step_size maximum step length
◆ SetTransformationEpsilon()
|
inline |
Set the transformation epsilon (maximum allowable difference between two consecutive transformations.
◆ TrialValueSelectionMt()
|
protected |
Select new trial value for More-Thuente method.
◆ UpdateDerivatives()
|
protected |
Compute individual point contributions to derivatives of probability function w.r.t. the transformation vector.
◆ UpdateHessian()
|
protected |
Compute individual point contributions to hessian of probability function.
◆ UpdateIntervalMt()
|
protected |
Update interval of possible step lengths for More-Thuente method.
Member Data Documentation
◆ converged_
|
protected |
◆ final_transformation_
|
protected |
◆ gauss_d1_
|
protected |
The normalization constants used fit the point distribution to a normal distribution, Equation 6.8 [Magnusson 2009].
◆ gauss_d2_
|
protected |
◆ h_ang_a2_
|
protected |
The precomputed angular derivatives for the hessian of a transformation vector, Equation 6.19 [Magnusson 2009].
◆ h_ang_a3_
|
protected |
◆ h_ang_b2_
|
protected |
◆ h_ang_b3_
|
protected |
◆ h_ang_c2_
|
protected |
◆ h_ang_c3_
|
protected |
◆ h_ang_d1_
|
protected |
◆ h_ang_d2_
|
protected |
◆ h_ang_d3_
|
protected |
◆ h_ang_e1_
|
protected |
◆ h_ang_e2_
|
protected |
◆ h_ang_e3_
|
protected |
◆ h_ang_f1_
|
protected |
◆ h_ang_f2_
|
protected |
◆ h_ang_f3_
|
protected |
◆ input_
|
protected |
A pointer of input source point cloud.
◆ j_ang_a_
|
protected |
The precomputed angular derivatives for the jacobian of a transformation vector, Equation 6.19 [Magnusson 2009].
◆ j_ang_b_
|
protected |
◆ j_ang_c_
|
protected |
◆ j_ang_d_
|
protected |
◆ j_ang_e_
|
protected |
◆ j_ang_f_
|
protected |
◆ j_ang_g_
|
protected |
◆ j_ang_h_
|
protected |
◆ max_iterations_
|
protected |
max iterations.
◆ nr_iterations_
|
protected |
finnal iterations.
◆ outlier_ratio_
|
protected |
The ratio of outliers of points w.r.t. a normal distribution, Equation 6.7 [Magnusson 2009].
◆ point_gradient_
|
protected |
The first order derivative of the transformation of a point w.r.t. the transform vector, Equation 6.18 [Magnusson 2009].
◆ point_hessian_
|
protected |
The second order derivative of the transformation of a point w.r.t. the transform vector, Equation 6.20 [Magnusson 2009].
◆ previous_transformation_
|
protected |
transformations.
◆ resolution_
|
protected |
The side length of voxels.
◆ step_size_
|
protected |
The maximum step length.
◆ target_
|
protected |
A pointer of input target point cloud.
◆ target_cells_
|
protected |
The voxel grid generated from target cloud containing point means and covariances.
◆ target_tree_
|
protected |
A pointer to the spatial search object.
◆ trans_probability_
|
protected |
The probability score of the transform applied to the input cloud, Equation 6.9 and 6.10 [Magnusson 2009].
◆ transformation_
|
protected |
◆ transformation_epsilon_
|
protected |
Transformation epsilon parameter.
The documentation for this class was generated from the following file:
- modules/localization/ndt/ndt_locator/ndt_solver.h
