#include <open_space_trajectory_provider.h>
◆ end_pose
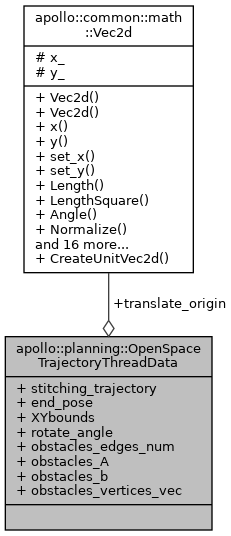
| std::vector<double> apollo::planning::OpenSpaceTrajectoryThreadData::end_pose |
◆ obstacles_A
| Eigen::MatrixXd apollo::planning::OpenSpaceTrajectoryThreadData::obstacles_A |
◆ obstacles_b
| Eigen::MatrixXd apollo::planning::OpenSpaceTrajectoryThreadData::obstacles_b |
◆ obstacles_edges_num
| Eigen::MatrixXi apollo::planning::OpenSpaceTrajectoryThreadData::obstacles_edges_num |
◆ obstacles_vertices_vec
| std::vector<std::vector<common::math::Vec2d> > apollo::planning::OpenSpaceTrajectoryThreadData::obstacles_vertices_vec |
◆ rotate_angle
| double apollo::planning::OpenSpaceTrajectoryThreadData::rotate_angle |
◆ stitching_trajectory
| std::vector<common::TrajectoryPoint> apollo::planning::OpenSpaceTrajectoryThreadData::stitching_trajectory |
◆ translate_origin
◆ XYbounds
| std::vector<double> apollo::planning::OpenSpaceTrajectoryThreadData::XYbounds |
The documentation for this struct was generated from the following file: