#include <spp_struct.h>
◆ ~SppData()
| apollo::perception::lidar::SppData::~SppData |
( |
| ) |
|
◆ MakeReference()
| void apollo::perception::lidar::SppData::MakeReference |
( |
size_t |
width, |
|
|
size_t |
height, |
|
|
float |
range |
|
) |
| |
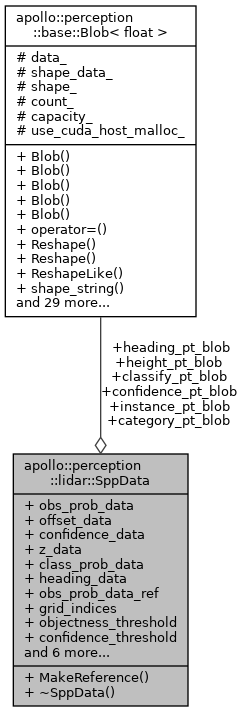
◆ category_pt_blob
| base::Blob<float>* apollo::perception::lidar::SppData::category_pt_blob = nullptr |
◆ class_num
| size_t apollo::perception::lidar::SppData::class_num = 0 |
◆ class_prob_data
| float* apollo::perception::lidar::SppData::class_prob_data = nullptr |
◆ classify_pt_blob
| base::Blob<float>* apollo::perception::lidar::SppData::classify_pt_blob = nullptr |
◆ confidence_data
| float* apollo::perception::lidar::SppData::confidence_data = nullptr |
◆ confidence_pt_blob
| base::Blob<float>* apollo::perception::lidar::SppData::confidence_pt_blob = nullptr |
◆ confidence_threshold
| float apollo::perception::lidar::SppData::confidence_threshold = 0.f |
◆ data_height
| size_t apollo::perception::lidar::SppData::data_height = 0 |
◆ data_range
| float apollo::perception::lidar::SppData::data_range = 0.0f |
◆ data_size
| size_t apollo::perception::lidar::SppData::data_size = 0 |
◆ data_width
| size_t apollo::perception::lidar::SppData::data_width = 0 |
◆ grid_indices
| int* apollo::perception::lidar::SppData::grid_indices = nullptr |
◆ heading_data
| float* apollo::perception::lidar::SppData::heading_data = nullptr |
◆ heading_pt_blob
| base::Blob<float>* apollo::perception::lidar::SppData::heading_pt_blob = nullptr |
◆ height_pt_blob
| base::Blob<float>* apollo::perception::lidar::SppData::height_pt_blob = nullptr |
◆ instance_pt_blob
| base::Blob<float>* apollo::perception::lidar::SppData::instance_pt_blob = nullptr |
◆ objectness_threshold
| float apollo::perception::lidar::SppData::objectness_threshold = 0.f |
◆ obs_prob_data
| float* apollo::perception::lidar::SppData::obs_prob_data = nullptr |
◆ obs_prob_data_ref
| float** apollo::perception::lidar::SppData::obs_prob_data_ref = nullptr |
◆ offset_data
| float* apollo::perception::lidar::SppData::offset_data = nullptr |
◆ top_z_threshold
| float apollo::perception::lidar::SppData::top_z_threshold = 0.f |
◆ z_data
| float* apollo::perception::lidar::SppData::z_data = nullptr |
The documentation for this struct was generated from the following file:
- modules/perception/lidar/lib/detector/cnn_segmentation/spp_engine/spp_struct.h