#include <lane_based_calibrator.h>
◆ CalibratorParams()
| apollo::perception::camera::CalibratorParams::CalibratorParams |
( |
| ) |
|
|
inline |
◆ Init()
| void apollo::perception::camera::CalibratorParams::Init |
( |
| ) |
|
◆ operator=()
| void apollo::perception::camera::CalibratorParams::operator= |
( |
const CalibratorParams & |
params | ) |
|
|
inline |
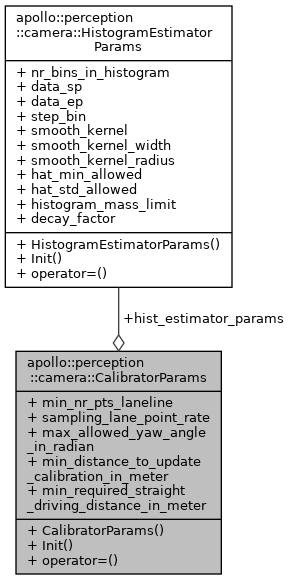
◆ hist_estimator_params
◆ max_allowed_yaw_angle_in_radian
| float apollo::perception::camera::CalibratorParams::max_allowed_yaw_angle_in_radian |
◆ min_distance_to_update_calibration_in_meter
| float apollo::perception::camera::CalibratorParams::min_distance_to_update_calibration_in_meter |
◆ min_nr_pts_laneline
| int apollo::perception::camera::CalibratorParams::min_nr_pts_laneline |
◆ min_required_straight_driving_distance_in_meter
| float apollo::perception::camera::CalibratorParams::min_required_straight_driving_distance_in_meter |
◆ sampling_lane_point_rate
| float apollo::perception::camera::CalibratorParams::sampling_lane_point_rate |
The documentation for this struct was generated from the following file: