Contains a number of helper functions related to quaternions. The reader should refer to euler_angles_zxy.h for clarifications. However, although the vehicle frame defined therein might change, the definition of the heading of the car, used below, is permanently fixed: 0 at East, pi/2 at North, -pi/2 at South. More...
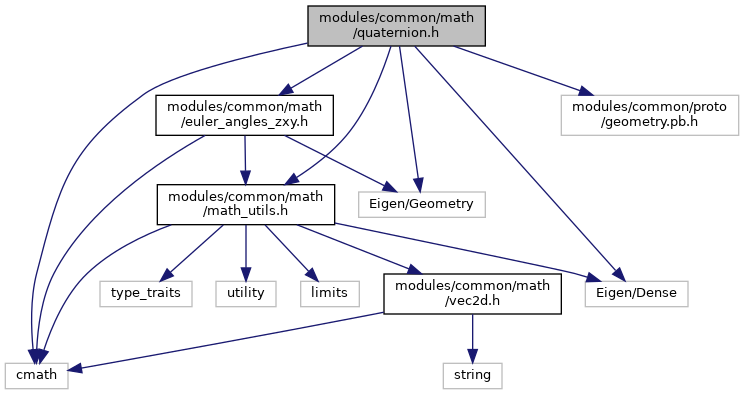
#include <cmath>#include "Eigen/Dense"#include "Eigen/Geometry"#include "modules/common/math/euler_angles_zxy.h"#include "modules/common/math/math_utils.h"#include "modules/common/proto/geometry.pb.h"
Include dependency graph for quaternion.h:
Go to the source code of this file.
Namespaces | |
| apollo::common::math | |
| apollo::common::math | |
| apollo | |
| PlanningContext is the runtime context in planning. It is persistent across multiple frames. | |
| apollo::common | |
| apollo::common | |
Functions | |
| double | apollo::common::math::QuaternionToHeading (const double qw, const double qx, const double qy, const double qz) |
| template<typename T > | |
| T | apollo::common::math::QuaternionToHeading (const Eigen::Quaternion< T > &q) |
| template<typename T > | |
| Eigen::Quaternion< T > | apollo::common::math::HeadingToQuaternion (T heading) |
| Eigen::Vector3d | apollo::common::math::QuaternionRotate (const Quaternion &orientation, const Eigen::Vector3d &original) |
| Eigen::Vector3d | apollo::common::math::InverseQuaternionRotate (const Quaternion &orientation, const Eigen::Vector3d &rotated) |
Detailed Description
Contains a number of helper functions related to quaternions. The reader should refer to euler_angles_zxy.h for clarifications. However, although the vehicle frame defined therein might change, the definition of the heading of the car, used below, is permanently fixed: 0 at East, pi/2 at North, -pi/2 at South.
