This file provides the declaration of the class "NaviSpeedTsGraph". More...
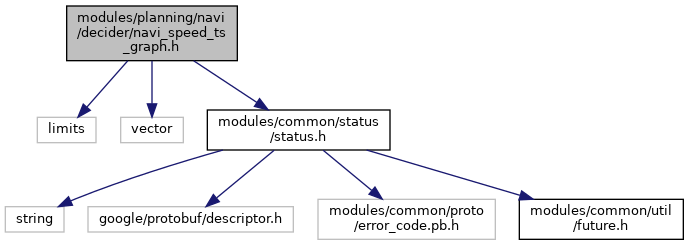
Include dependency graph for navi_speed_ts_graph.h:
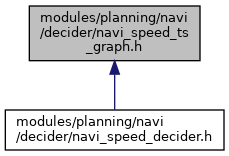
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| struct | apollo::planning::NaviSpeedTsConstraints |
| NaviSpeedTsConstraints is used to describe constraints of a t-s point. More... | |
| struct | apollo::planning::NaviSpeedTsPoint |
| NaviSpeedTsPoint is used to describe a t-s point. More... | |
| class | apollo::planning::NaviSpeedTsGraph |
| NaviSpeedTsGraph is used to generate a t-s graph with some limits and preferred. More... | |
Namespaces | |
| apollo::planning | |
| apollo::planning | |
| apollo | |
| PlanningContext is the runtime context in planning. It is persistent across multiple frames. | |
Detailed Description
This file provides the declaration of the class "NaviSpeedTsGraph".
