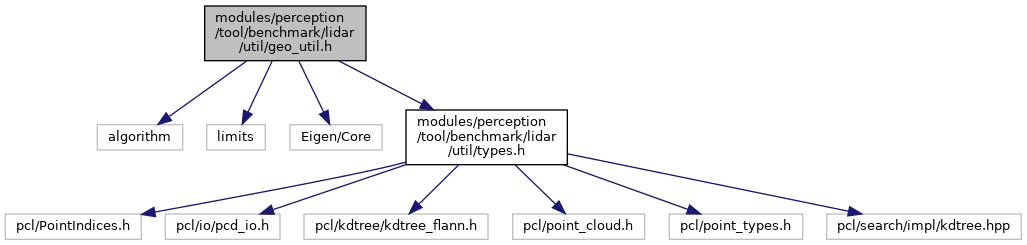
#include <algorithm>#include <limits>#include "Eigen/Core"#include "modules/perception/tool/benchmark/lidar/util/types.h"
Include dependency graph for geo_util.h:
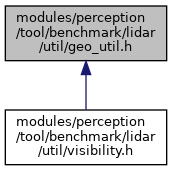
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| struct | apollo::perception::benchmark::VisPoint |
| struct | apollo::perception::benchmark::Segment |
Namespaces | |
| apollo | |
| PlanningContext is the runtime context in planning. It is persistent across multiple frames. | |
| apollo::perception | |
| apollo::perception | |
| apollo::perception::benchmark | |
Functions | |
| template<typename T > | |
| void | apollo::perception::benchmark::quaternion_to_rotation_matrix (const T *quat, T *R) |
| bool | apollo::perception::benchmark::is_point_xy_in_polygon2d_xy (const Point &point, const PointCloud &polygon, float distance_to_boundary) |
| bool | apollo::perception::benchmark::approx_equal (float a, float b) |
| bool | apollo::perception::benchmark::strictly_less (float a, float b) |
| Orientation | apollo::perception::benchmark::compute_orientation (const VisPoint &o, const VisPoint &a, const VisPoint &b) |
| bool | apollo::perception::benchmark::intersects (const VisPoint &ray, const Segment &segment, VisPoint *intersection) |
