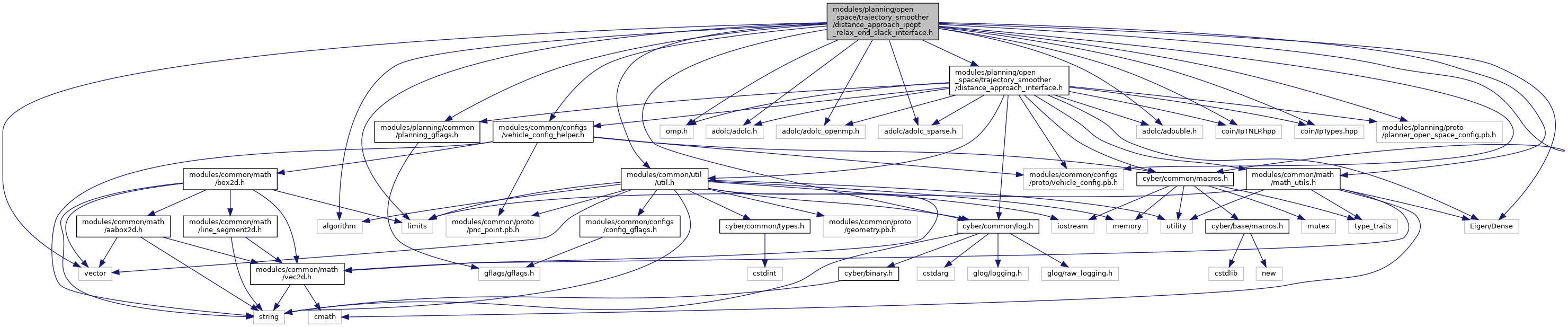
#include <algorithm>
#include <limits>
#include <vector>
#include <omp.h>
#include <adolc/adolc.h>
#include <adolc/adolc_openmp.h>
#include <adolc/adolc_sparse.h>
#include <adolc/adouble.h>
#include <coin/IpTNLP.hpp>
#include <coin/IpTypes.hpp>
#include "Eigen/Dense"
#include "cyber/common/log.h"
#include "cyber/common/macros.h"
#include "modules/common/configs/proto/vehicle_config.pb.h"
#include "modules/common/configs/vehicle_config_helper.h"
#include "modules/common/math/math_utils.h"
#include "modules/common/util/util.h"
#include "modules/planning/common/planning_gflags.h"
#include "modules/planning/open_space/trajectory_smoother/distance_approach_interface.h"
#include "modules/planning/proto/planner_open_space_config.pb.h"
Go to the source code of this file.
◆ HPOFF
◆ tag_f
◆ tag_g
◆ tag_L