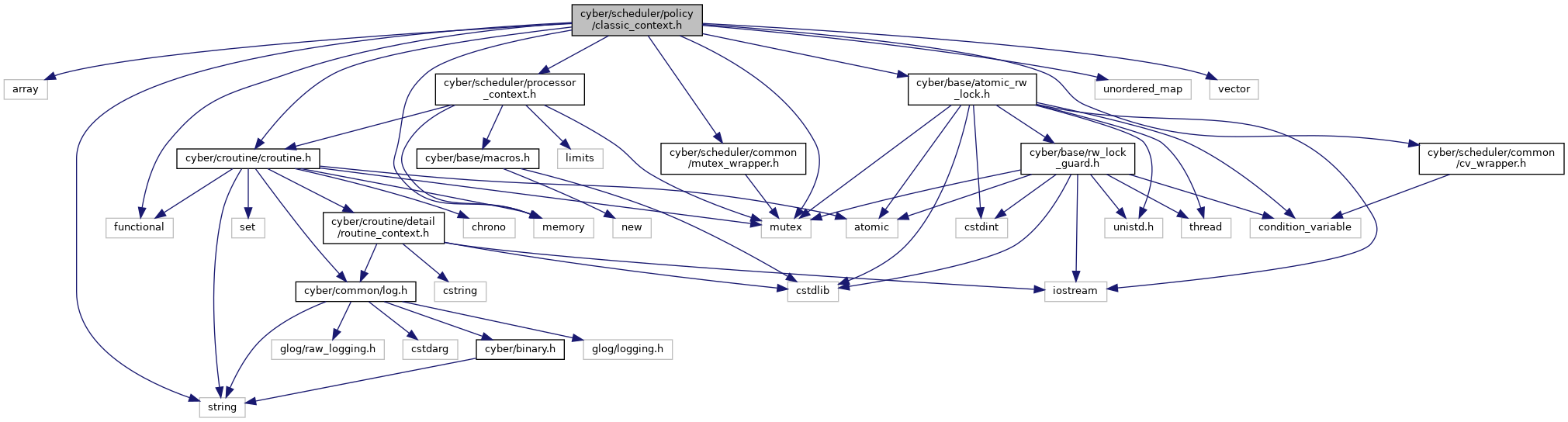
#include <array>#include <functional>#include <memory>#include <mutex>#include <string>#include <unordered_map>#include <vector>#include "cyber/base/atomic_rw_lock.h"#include "cyber/croutine/croutine.h"#include "cyber/scheduler/common/cv_wrapper.h"#include "cyber/scheduler/common/mutex_wrapper.h"#include "cyber/scheduler/processor_context.h"
Include dependency graph for classic_context.h:
Go to the source code of this file.
Classes | |
| class | apollo::cyber::scheduler::ClassicContext |
Namespaces | |
| apollo | |
| PlanningContext is the runtime context in planning. It is persistent across multiple frames. | |
| apollo::cyber | |
| apollo::cyber::scheduler | |
Macros | |
| #define | DEFAULT_GROUP_NAME "default_grp" |
Typedefs | |
| using | apollo::cyber::scheduler::CROUTINE_QUEUE = std::vector< std::shared_ptr< CRoutine > > |
| using | apollo::cyber::scheduler::MULTI_PRIO_QUEUE = std::array< CROUTINE_QUEUE, MAX_PRIO > |
| using | apollo::cyber::scheduler::CR_GROUP = std::unordered_map< std::string, MULTI_PRIO_QUEUE > |
| using | apollo::cyber::scheduler::LOCK_QUEUE = std::array< base::AtomicRWLock, MAX_PRIO > |
| using | apollo::cyber::scheduler::RQ_LOCK_GROUP = std::unordered_map< std::string, LOCK_QUEUE > |
| using | apollo::cyber::scheduler::GRP_WQ_MUTEX = std::unordered_map< std::string, MutexWrapper > |
| using | apollo::cyber::scheduler::GRP_WQ_CV = std::unordered_map< std::string, CvWrapper > |
| using | apollo::cyber::scheduler::NOTIFY_GRP = std::unordered_map< std::string, int > |
Macro Definition Documentation
◆ DEFAULT_GROUP_NAME
| #define DEFAULT_GROUP_NAME "default_grp" |
