NaviSpeedDecider is used to generate an appropriate speed curve of the vehicle in navigation mode. Note that NaviSpeedDecider is only used in navigation mode (turn on navigation mode by setting "FLAGS_use_navigation_mode" to "true") and do not use it in standard mode.
More...
#include <navi_speed_decider.h>
NaviSpeedDecider is used to generate an appropriate speed curve of the vehicle in navigation mode. Note that NaviSpeedDecider is only used in navigation mode (turn on navigation mode by setting "FLAGS_use_navigation_mode" to "true") and do not use it in standard mode.
◆ NaviSpeedDecider()
| apollo::planning::NaviSpeedDecider::NaviSpeedDecider |
( |
| ) |
|
◆ ~NaviSpeedDecider()
| virtual apollo::planning::NaviSpeedDecider::~NaviSpeedDecider |
( |
| ) |
|
|
virtualdefault |
◆ Execute()
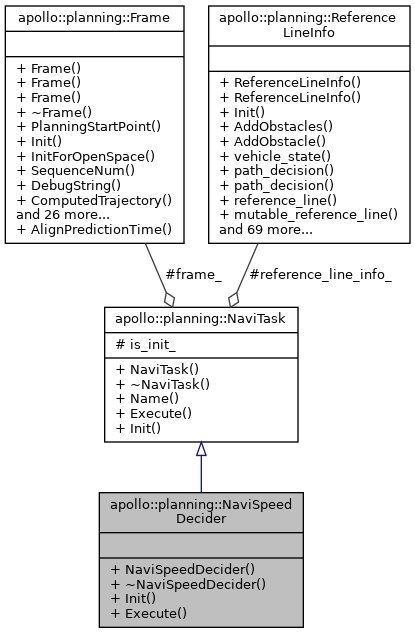
Overrided implementation of the virtual function "Execute" in the base class "Task".
- Parameters
-
| frame | Current planning frame. |
| reference_line_info | Currently available reference line information. |
- Returns
- Status::OK() if a suitable path is created; error otherwise.
Reimplemented from apollo::planning::NaviTask.
◆ Init()
| bool apollo::planning::NaviSpeedDecider::Init |
( |
const PlanningConfig & |
config | ) |
|
|
overridevirtual |
The documentation for this class was generated from the following file:
 Public Member Functions inherited from apollo::planning::NaviTask
Public Member Functions inherited from apollo::planning::NaviTask