NaviPathDecider is used to generate the local driving path of the .* vehicle in navigation mode. Note that NaviPathDecider is only used in navigation mode (turn on navigation mode by setting "FLAGS_use_navigation_mode" to "true") and do not use it in standard mode. More...
#include <navi_path_decider.h>
Inheritance diagram for apollo::planning::NaviPathDecider:
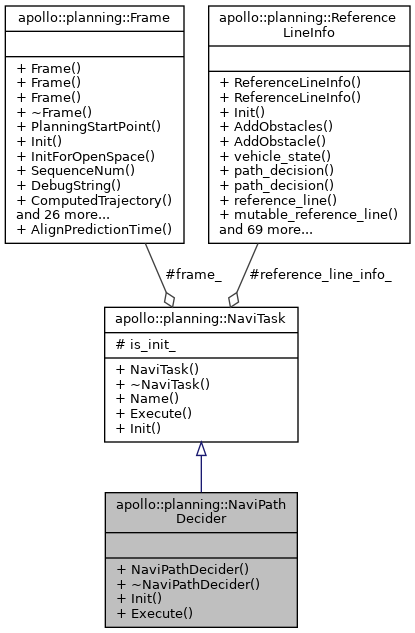
Collaboration diagram for apollo::planning::NaviPathDecider:
Public Member Functions | |
| NaviPathDecider () | |
| virtual | ~NaviPathDecider ()=default |
| bool | Init (const PlanningConfig &config) override |
| apollo::common::Status | Execute (Frame *frame, ReferenceLineInfo *reference_line_info) override |
| Overrided implementation of the virtual function "Execute" in the base class "Task". More... | |
 Public Member Functions inherited from apollo::planning::NaviTask Public Member Functions inherited from apollo::planning::NaviTask | |
| NaviTask (const std::string &name) | |
| virtual | ~NaviTask ()=default |
| virtual const std::string & | Name () const |
Additional Inherited Members | |
| Protected Attributes inherited from apollo::planning::NaviTask | |
| bool | is_init_ = false |
| Frame * | frame_ = nullptr |
| ReferenceLineInfo * | reference_line_info_ = nullptr |
Detailed Description
NaviPathDecider is used to generate the local driving path of the .* vehicle in navigation mode. Note that NaviPathDecider is only used in navigation mode (turn on navigation mode by setting "FLAGS_use_navigation_mode" to "true") and do not use it in standard mode.
Constructor & Destructor Documentation
◆ NaviPathDecider()
| apollo::planning::NaviPathDecider::NaviPathDecider | ( | ) |
◆ ~NaviPathDecider()
|
virtualdefault |
Member Function Documentation
◆ Execute()
|
overridevirtual |
Overrided implementation of the virtual function "Execute" in the base class "Task".
- Parameters
-
frame Current planning frame. reference_line_info Currently available reference line information.
- Returns
- Status::OK() if a suitable path is created; error otherwise.
Reimplemented from apollo::planning::NaviTask.
◆ Init()
|
overridevirtual |
Reimplemented from apollo::planning::NaviTask.
The documentation for this class was generated from the following file:
- modules/planning/navi/decider/navi_path_decider.h
