#include <ground_service.h>
◆ GroundServiceContent()
| apollo::perception::lidar::GroundServiceContent::GroundServiceContent |
( |
| ) |
|
|
default |
◆ ~GroundServiceContent()
| apollo::perception::lidar::GroundServiceContent::~GroundServiceContent |
( |
| ) |
|
|
default |
◆ GetCopy()
| void apollo::perception::lidar::GroundServiceContent::GetCopy |
( |
SceneServiceContent * |
content | ) |
const |
|
overridevirtual |
◆ Init()
| bool apollo::perception::lidar::GroundServiceContent::Init |
( |
double |
roi_x, |
|
|
double |
roi_y, |
|
|
uint32_t |
rows, |
|
|
uint32_t |
cols |
|
) |
| |
◆ Name()
| std::string apollo::perception::lidar::GroundServiceContent::Name |
( |
| ) |
const |
|
inlineoverridevirtual |
◆ PointToGrid()
| bool apollo::perception::lidar::GroundServiceContent::PointToGrid |
( |
const Eigen::Vector3d & |
world_point, |
|
|
uint32_t * |
grid_index |
|
) |
| const |
◆ PointToPlaneDistance()
| float apollo::perception::lidar::GroundServiceContent::PointToPlaneDistance |
( |
const Eigen::Vector3d & |
world_point | ) |
const |
◆ SetContent()
| void apollo::perception::lidar::GroundServiceContent::SetContent |
( |
const SceneServiceContent & |
content | ) |
|
|
overridevirtual |
◆ bound_x_max_
| double apollo::perception::lidar::GroundServiceContent::bound_x_max_ = 0.0 |
◆ bound_x_min_
| double apollo::perception::lidar::GroundServiceContent::bound_x_min_ = 0.0 |
◆ bound_y_max_
| double apollo::perception::lidar::GroundServiceContent::bound_y_max_ = 0.0 |
◆ bound_y_min_
| double apollo::perception::lidar::GroundServiceContent::bound_y_min_ = 0.0 |
◆ cols_
| uint32_t apollo::perception::lidar::GroundServiceContent::cols_ = 0 |
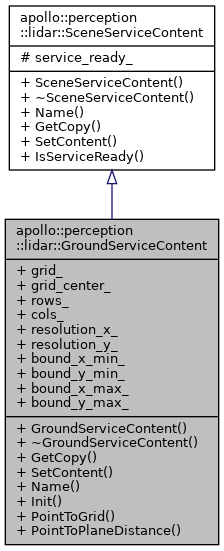
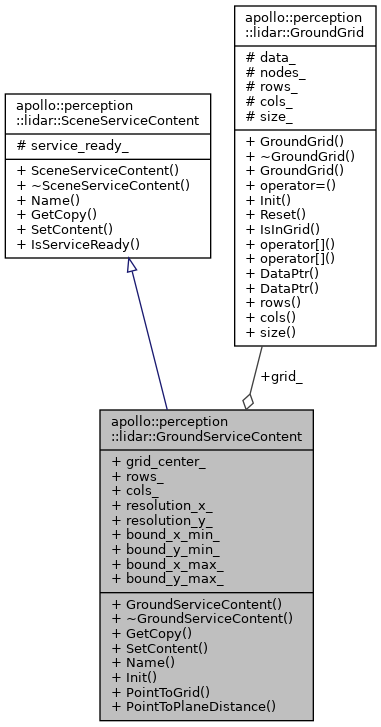
◆ grid_
| GroundGrid apollo::perception::lidar::GroundServiceContent::grid_ |
◆ grid_center_
| Eigen::Vector3d apollo::perception::lidar::GroundServiceContent::grid_center_ |
◆ resolution_x_
| double apollo::perception::lidar::GroundServiceContent::resolution_x_ = 0.0 |
◆ resolution_y_
| double apollo::perception::lidar::GroundServiceContent::resolution_y_ = 0.0 |
◆ rows_
| uint32_t apollo::perception::lidar::GroundServiceContent::rows_ = 0 |
The documentation for this class was generated from the following file:
 Public Member Functions inherited from apollo::perception::lidar::SceneServiceContent
Public Member Functions inherited from apollo::perception::lidar::SceneServiceContent