#include <laneline_calibrator.h>
◆ LaneLineCalibrator()
| apollo::perception::camera::LaneLineCalibrator::LaneLineCalibrator |
( |
| ) |
|
|
inline |
◆ ~LaneLineCalibrator()
| virtual apollo::perception::camera::LaneLineCalibrator::~LaneLineCalibrator |
( |
| ) |
|
|
inlinevirtual |
◆ Calibrate()
| bool apollo::perception::camera::LaneLineCalibrator::Calibrate |
( |
const CalibratorOptions & |
options, |
|
|
float * |
pitch_angle |
|
) |
| |
|
overridevirtual |
◆ GetTimeDiff()
| float apollo::perception::camera::LaneLineCalibrator::GetTimeDiff |
( |
| ) |
const |
|
inline |
◆ GetVanishingRow()
| float apollo::perception::camera::LaneLineCalibrator::GetVanishingRow |
( |
| ) |
const |
|
inline |
◆ GetVelocity()
| float apollo::perception::camera::LaneLineCalibrator::GetVelocity |
( |
| ) |
const |
|
inline |
◆ GetYawRate()
| float apollo::perception::camera::LaneLineCalibrator::GetYawRate |
( |
| ) |
const |
|
inline |
◆ Init()
◆ Name()
| std::string apollo::perception::camera::LaneLineCalibrator::Name |
( |
| ) |
const |
|
inlineoverridevirtual |
The documentation for this class was generated from the following file:
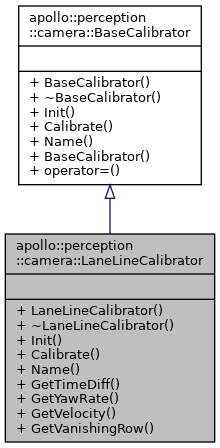
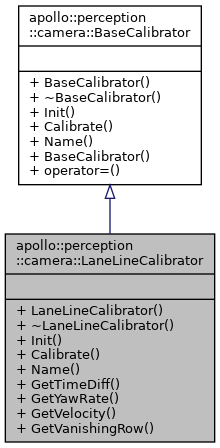
 Public Member Functions inherited from apollo::perception::camera::BaseCalibrator
Public Member Functions inherited from apollo::perception::camera::BaseCalibrator