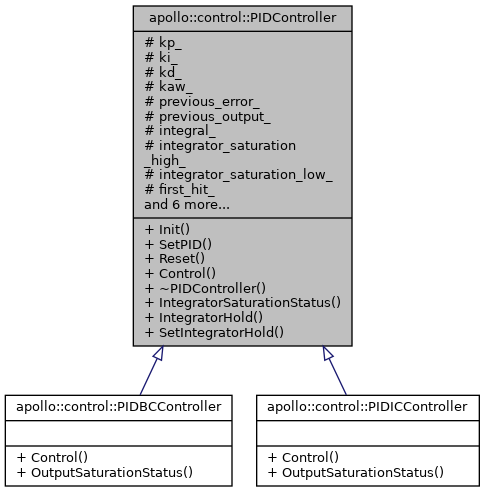
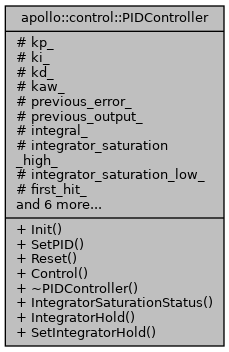
A proportional-integral-derivative controller for speed and steering using defualt integral hold.
More...
#include <pid_controller.h>
A proportional-integral-derivative controller for speed and steering using defualt integral hold.
◆ ~PIDController()
| virtual apollo::control::PIDController::~PIDController |
( |
| ) |
|
|
virtualdefault |
◆ Control()
| virtual double apollo::control::PIDController::Control |
( |
const double |
error, |
|
|
const double |
dt |
|
) |
| |
|
virtual |
◆ Init()
| void apollo::control::PIDController::Init |
( |
const PidConf & |
pid_conf | ) |
|
initialize pid controller
- Parameters
-
| pid_conf | configuration for pid controller |
◆ IntegratorHold()
| bool apollo::control::PIDController::IntegratorHold |
( |
| ) |
const |
get status that if integrator is hold
- Returns
- if integrator is hold return true
◆ IntegratorSaturationStatus()
| int apollo::control::PIDController::IntegratorSaturationStatus |
( |
| ) |
const |
get saturation status
- Returns
- saturation status
◆ Reset()
| void apollo::control::PIDController::Reset |
( |
| ) |
|
reset variables for pid controller
◆ SetIntegratorHold()
| void apollo::control::PIDController::SetIntegratorHold |
( |
bool |
hold | ) |
|
set whether to hold integrator component at its current value.
- Parameters
-
◆ SetPID()
| void apollo::control::PIDController::SetPID |
( |
const PidConf & |
pid_conf | ) |
|
set pid controller coefficients for the proportional, integral, and derivative
- Parameters
-
| pid_conf | configuration for pid controller |
◆ first_hit_
| bool apollo::control::PIDController::first_hit_ = false |
|
protected |
◆ integral_
| double apollo::control::PIDController::integral_ = 0.0 |
|
protected |
◆ integrator_enabled_
| bool apollo::control::PIDController::integrator_enabled_ = false |
|
protected |
◆ integrator_hold_
| bool apollo::control::PIDController::integrator_hold_ = false |
|
protected |
◆ integrator_saturation_high_
| double apollo::control::PIDController::integrator_saturation_high_ = 0.0 |
|
protected |
◆ integrator_saturation_low_
| double apollo::control::PIDController::integrator_saturation_low_ = 0.0 |
|
protected |
◆ integrator_saturation_status_
| int apollo::control::PIDController::integrator_saturation_status_ = 0 |
|
protected |
◆ kaw_
| double apollo::control::PIDController::kaw_ = 0.0 |
|
protected |
◆ kd_
| double apollo::control::PIDController::kd_ = 0.0 |
|
protected |
◆ ki_
| double apollo::control::PIDController::ki_ = 0.0 |
|
protected |
◆ kp_
| double apollo::control::PIDController::kp_ = 0.0 |
|
protected |
◆ output_saturation_high_
| double apollo::control::PIDController::output_saturation_high_ = 0.0 |
|
protected |
◆ output_saturation_low_
| double apollo::control::PIDController::output_saturation_low_ = 0.0 |
|
protected |
◆ output_saturation_status_
| int apollo::control::PIDController::output_saturation_status_ = 0 |
|
protected |
◆ previous_error_
| double apollo::control::PIDController::previous_error_ = 0.0 |
|
protected |
◆ previous_output_
| double apollo::control::PIDController::previous_output_ = 0.0 |
|
protected |
The documentation for this class was generated from the following file: