#include <adc_motioncontrollimits1_12.h>
|
| static std::uint8_t | CalculateCheckSum (const uint8_t *input, const uint32_t length) |
| | static function, used to calculate the checksum of input array. More...
|
| |
| static T | BoundedValue (T lower, T upper, T val) |
| |
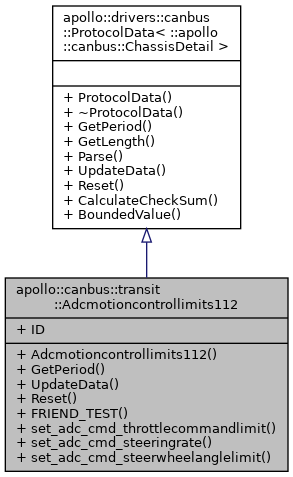
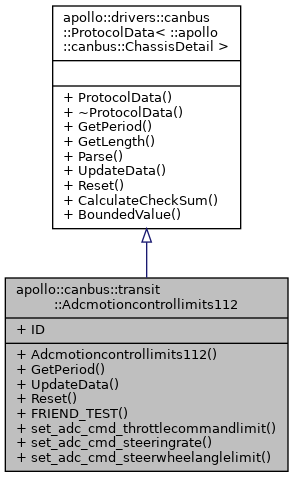
◆ Adcmotioncontrollimits112()
| apollo::canbus::transit::Adcmotioncontrollimits112::Adcmotioncontrollimits112 |
( |
| ) |
|
◆ FRIEND_TEST()
| apollo::canbus::transit::Adcmotioncontrollimits112::FRIEND_TEST |
( |
Motioncontrollimits1_12_test |
, |
|
|
General |
|
|
) |
| |
◆ GetPeriod()
| uint32_t apollo::canbus::transit::Adcmotioncontrollimits112::GetPeriod |
( |
| ) |
const |
|
overridevirtual |
◆ Reset()
| void apollo::canbus::transit::Adcmotioncontrollimits112::Reset |
( |
| ) |
|
|
overridevirtual |
◆ set_adc_cmd_steeringrate()
| Adcmotioncontrollimits112* apollo::canbus::transit::Adcmotioncontrollimits112::set_adc_cmd_steeringrate |
( |
double |
adc_cmd_steeringrate | ) |
|
◆ set_adc_cmd_steerwheelanglelimit()
| Adcmotioncontrollimits112* apollo::canbus::transit::Adcmotioncontrollimits112::set_adc_cmd_steerwheelanglelimit |
( |
double |
adc_cmd_steerwheelanglelimit | ) |
|
◆ set_adc_cmd_throttlecommandlimit()
| Adcmotioncontrollimits112* apollo::canbus::transit::Adcmotioncontrollimits112::set_adc_cmd_throttlecommandlimit |
( |
double |
adc_cmd_throttlecommandlimit | ) |
|
◆ UpdateData()
| void apollo::canbus::transit::Adcmotioncontrollimits112::UpdateData |
( |
uint8_t * |
data | ) |
|
|
overridevirtual |
◆ ID
| const int32_t apollo::canbus::transit::Adcmotioncontrollimits112::ID |
|
static |
The documentation for this class was generated from the following file:
 Public Member Functions inherited from apollo::drivers::canbus::ProtocolData< ::apollo::canbus::ChassisDetail >
Public Member Functions inherited from apollo::drivers::canbus::ProtocolData< ::apollo::canbus::ChassisDetail >