|
| virtual void | Parse (const std::uint8_t *bytes, int32_t length, ChassisDetail *chassis_detail) const |
| |
| int32_t | gear_state (const std::uint8_t *bytes, int32_t length) const |
| | get the gear state from byte array config detail: {'name': 'state', 'offset': 0.0, 'precision': 1.0, 'len': 3, 'f_type': 'value', 'is_signed_var': False, 'physical_range': '[0|0]', 'bit': 0, 'type': 'int', 'order': 'intel', 'physical_unit': '""'} More...
|
| |
| bool | is_canbus_fault (const std::uint8_t *bytes, int32_t length) const |
| | check canbus fault from byte array config detail: {'name': 'fltbus', 'offset': 0.0, 'precision': 1.0, 'len': 1, 'f_type': 'valid', 'is_signed_var': False, 'physical_range': '[0|0]', 'bit': 7, 'type': 'bool', 'order': 'intel', 'physical_unit': '""'} More...
|
| |
| bool | is_driver_override (const std::uint8_t *bytes, int32_t length) const |
| | check driver override from byte array config detail: {'name': 'driver', 'offset': 0.0, 'precision': 1.0, 'len': 1, 'f_type': 'valid', 'is_signed_var': False, 'physical_range': '[0|0]', 'bit': 3, 'type': 'bool', 'order': 'intel', 'physical_unit': '""'} More...
|
| |
| int32_t | reported_gear_cmd (const std::uint8_t *bytes, int32_t length) const |
| | get reported gear command from byte array config detail: {'name': 'cmd', 'offset': 0.0, 'precision': 1.0, 'len': 3, 'f_type': 'value', 'is_signed_var': False, 'physical_range': '[0|0]', 'bit': 4, 'type': 'int', 'order': 'intel', 'physical_unit': '""'} More...
|
| |
| | ProtocolData ()=default |
| | construct protocol data. More...
|
| |
| virtual | ~ProtocolData ()=default |
| | destruct protocol data. More...
|
| |
| virtual uint32_t | GetPeriod () const |
| |
| virtual int32_t | GetLength () const |
| |
| virtual void | Parse (const uint8_t *bytes, int32_t length, ::apollo::canbus::ChassisDetail *sensor_data) const |
| |
| virtual void | UpdateData (uint8_t *data) |
| |
| virtual void | Reset () |
| |
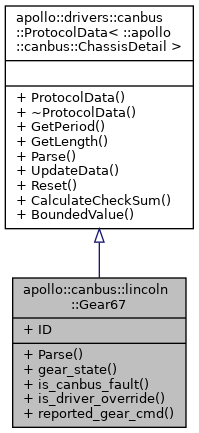
one of the protocol data of lincoln vehicle
| int32_t apollo::canbus::lincoln::Gear67::gear_state |
( |
const std::uint8_t * |
bytes, |
|
|
int32_t |
length |
|
) |
| const |
get the gear state from byte array config detail: {'name': 'state', 'offset': 0.0, 'precision': 1.0, 'len': 3, 'f_type': 'value', 'is_signed_var': False, 'physical_range': '[0|0]', 'bit': 0, 'type': 'int', 'order': 'intel', 'physical_unit': '""'}
- Parameters
-
| bytes | a pointer to the byte array |
| length | the length of the byte array |
- Returns
- the value of the gear state
| bool apollo::canbus::lincoln::Gear67::is_canbus_fault |
( |
const std::uint8_t * |
bytes, |
|
|
int32_t |
length |
|
) |
| const |
check canbus fault from byte array config detail: {'name': 'fltbus', 'offset': 0.0, 'precision': 1.0, 'len': 1, 'f_type': 'valid', 'is_signed_var': False, 'physical_range': '[0|0]', 'bit': 7, 'type': 'bool', 'order': 'intel', 'physical_unit': '""'}
- Parameters
-
| bytes | a pointer to the byte array |
| length | the length of the byte array |
- Returns
- the boolean value of canbus fault
| bool apollo::canbus::lincoln::Gear67::is_driver_override |
( |
const std::uint8_t * |
bytes, |
|
|
int32_t |
length |
|
) |
| const |
check driver override from byte array config detail: {'name': 'driver', 'offset': 0.0, 'precision': 1.0, 'len': 1, 'f_type': 'valid', 'is_signed_var': False, 'physical_range': '[0|0]', 'bit': 3, 'type': 'bool', 'order': 'intel', 'physical_unit': '""'}
- Parameters
-
| bytes | a pointer to the byte array |
| length | the length of the byte array |
- Returns
- the boolean value of driver override
| int32_t apollo::canbus::lincoln::Gear67::reported_gear_cmd |
( |
const std::uint8_t * |
bytes, |
|
|
int32_t |
length |
|
) |
| const |
get reported gear command from byte array config detail: {'name': 'cmd', 'offset': 0.0, 'precision': 1.0, 'len': 3, 'f_type': 'value', 'is_signed_var': False, 'physical_range': '[0|0]', 'bit': 4, 'type': 'int', 'order': 'intel', 'physical_unit': '""'}
- Parameters
-
| bytes | a pointer to the byte array |
| length | the length of the byte array |
- Returns
- the value of reported gear command

 Public Member Functions inherited from apollo::drivers::canbus::ProtocolData< ::apollo::canbus::ChassisDetail >
Public Member Functions inherited from apollo::drivers::canbus::ProtocolData< ::apollo::canbus::ChassisDetail >