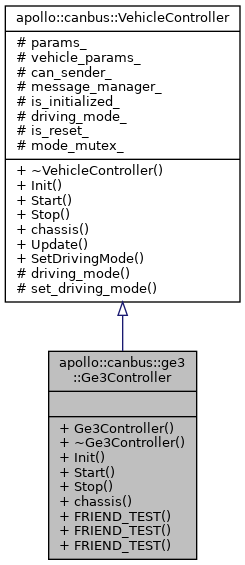
#include <ge3_controller.h>
|
| | Ge3Controller () |
| |
| virtual | ~Ge3Controller () |
| |
| ::apollo::common::ErrorCode | Init (const VehicleParameter ¶ms, CanSender<::apollo::canbus::ChassisDetail > *const can_sender, MessageManager<::apollo::canbus::ChassisDetail > *const message_manager) override |
| |
| bool | Start () override |
| | start the vehicle controller. More...
|
| |
| void | Stop () override |
| | stop the vehicle controller. More...
|
| |
| Chassis | chassis () override |
| | calculate and return the chassis. More...
|
| |
| | FRIEND_TEST (Ge3ControllerTest, SetDrivingMode) |
| |
| | FRIEND_TEST (Ge3ControllerTest, Status) |
| |
| | FRIEND_TEST (Ge3ControllerTest, UpdateDrivingMode) |
| |
| virtual | ~VehicleController ()=default |
| |
| virtual common::ErrorCode | Init (const VehicleParameter ¶ms, CanSender< ChassisDetail > *const can_sender, MessageManager< ChassisDetail > *const message_manager)=0 |
| | initialize the vehicle controller. More...
|
| |
| virtual common::ErrorCode | Update (const control::ControlCommand &command) |
| | update the vehicle controller. More...
|
| |
| virtual common::ErrorCode | SetDrivingMode (const Chassis::DrivingMode &driving_mode) |
| | set vehicle to appointed driving mode. More...
|
| |
◆ Ge3Controller()
| apollo::canbus::ge3::Ge3Controller::Ge3Controller |
( |
| ) |
|
|
inline |
◆ ~Ge3Controller()
| virtual apollo::canbus::ge3::Ge3Controller::~Ge3Controller |
( |
| ) |
|
|
virtual |
◆ chassis()
| Chassis apollo::canbus::ge3::Ge3Controller::chassis |
( |
| ) |
|
|
overridevirtual |
◆ FRIEND_TEST() [1/3]
| apollo::canbus::ge3::Ge3Controller::FRIEND_TEST |
( |
Ge3ControllerTest |
, |
|
|
SetDrivingMode |
|
|
) |
| |
◆ FRIEND_TEST() [2/3]
| apollo::canbus::ge3::Ge3Controller::FRIEND_TEST |
( |
Ge3ControllerTest |
, |
|
|
Status |
|
|
) |
| |
◆ FRIEND_TEST() [3/3]
| apollo::canbus::ge3::Ge3Controller::FRIEND_TEST |
( |
Ge3ControllerTest |
, |
|
|
UpdateDrivingMode |
|
|
) |
| |
◆ Init()
| ::apollo::common::ErrorCode apollo::canbus::ge3::Ge3Controller::Init |
( |
const VehicleParameter & |
params, |
|
|
CanSender<::apollo::canbus::ChassisDetail > *const |
can_sender, |
|
|
MessageManager<::apollo::canbus::ChassisDetail > *const |
message_manager |
|
) |
| |
|
override |
◆ Start()
| bool apollo::canbus::ge3::Ge3Controller::Start |
( |
| ) |
|
|
overridevirtual |
◆ Stop()
| void apollo::canbus::ge3::Ge3Controller::Stop |
( |
| ) |
|
|
overridevirtual |
The documentation for this class was generated from the following file:
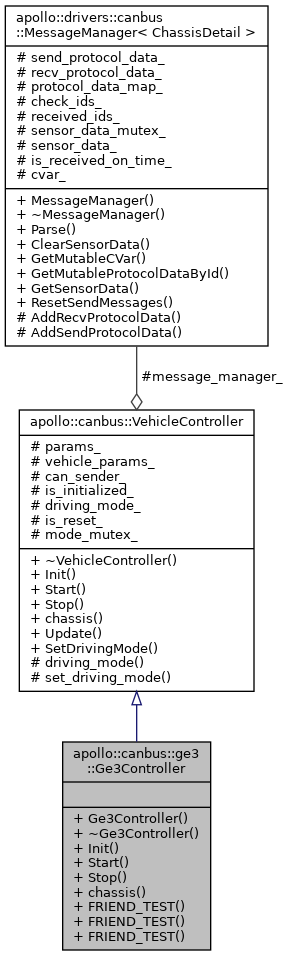
 Public Member Functions inherited from apollo::canbus::VehicleController
Public Member Functions inherited from apollo::canbus::VehicleController