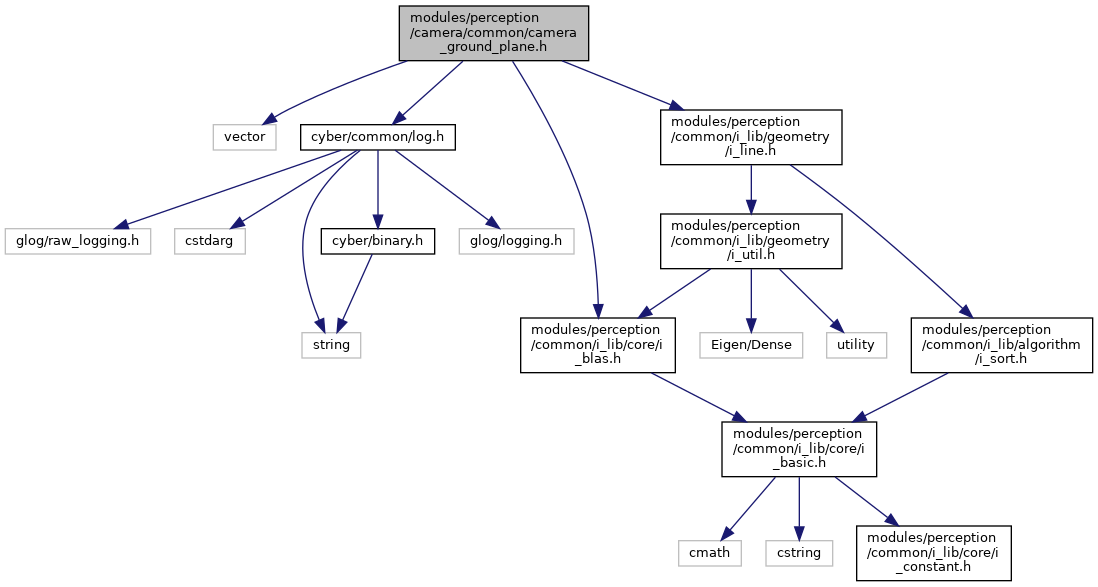
#include <vector>#include "cyber/common/log.h"#include "modules/perception/common/i_lib/core/i_blas.h"#include "modules/perception/common/i_lib/geometry/i_line.h"
Include dependency graph for camera_ground_plane.h:
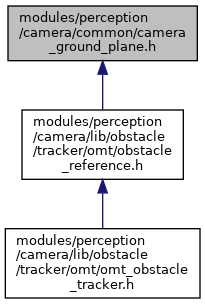
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| class | apollo::perception::camera::GroundPlaneTracker |
| struct | apollo::perception::camera::CameraGroundPlaneParams |
| class | apollo::perception::camera::CameraGroundPlaneDetector |
Namespaces | |
| apollo | |
| PlanningContext is the runtime context in planning. It is persistent across multiple frames. | |
| apollo::perception | |
| apollo::perception | |
| apollo::perception::camera | |
Functions | |
| void | apollo::perception::camera::ConvertGround3ToGround4 (const float &baseline, const std::vector< float > &k_mat, const std::vector< float > &ground3, std::vector< float > *ground4) |
| bool | apollo::perception::camera::ConvertGround4ToGround3 (const float &baseline, const std::vector< float > &k_mat, const std::vector< float > &ground4, std::vector< float > *ground3) |
| void | apollo::perception::camera::GetGroundPlanePitchHeight (const float &baseline, const std::vector< float > &k_mat, const std::vector< float > &ground3, float *pitch, float *cam_height) |
| void | apollo::perception::camera::GetGround3FromPitchHeight (const std::vector< float > &k_mat, const float &baseline, const float &pitch, const float &cam_height, std::vector< float > *ground3) |
| template<typename T > | |
| void | apollo::perception::camera::GroundHypoGenFunc (const T *v, const T *d, T *p) |
| template<typename T > | |
| void | apollo::perception::camera::GroundFittingCostFunc (const T *p, const T *v, const T *d, int n, int *nr_inlier, int *inliers, T *cost, T error_tol) |
