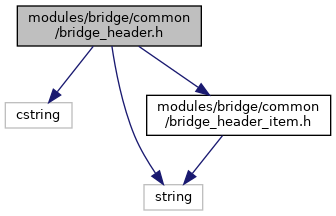
Include dependency graph for bridge_header.h:
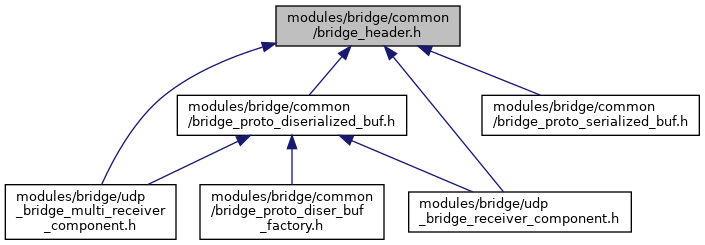
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| class | apollo::bridge::BridgeHeader |
Namespaces | |
| apollo | |
| PlanningContext is the runtime context in planning. It is persistent across multiple frames. | |
| apollo::bridge | |
Typedefs | |
| typedef uint32_t | apollo::bridge::hsize |
Variables | |
| constexpr char | apollo::bridge::BRIDGE_HEADER_FLAG [] = "ApolloBridgeHeader" |
| constexpr size_t | apollo::bridge::HEADER_FLAG_SIZE = sizeof(BRIDGE_HEADER_FLAG) |
| constexpr size_t | apollo::bridge::Item_Header_Size = sizeof(HType) + sizeof(bsize) + 2 |
