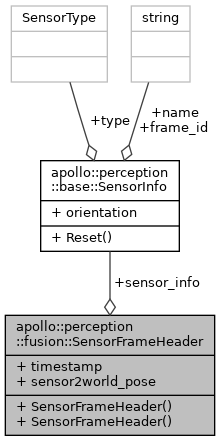
#include <sensor_frame.h>
◆ SensorFrameHeader() [1/2]
| apollo::perception::fusion::SensorFrameHeader::SensorFrameHeader |
( |
| ) |
|
|
default |
◆ SensorFrameHeader() [2/2]
| apollo::perception::fusion::SensorFrameHeader::SensorFrameHeader |
( |
const base::SensorInfo & |
info, |
|
|
double |
ts, |
|
|
const Eigen::Affine3d & |
pose |
|
) |
| |
|
inline |
◆ sensor2world_pose
| Eigen::Affine3d apollo::perception::fusion::SensorFrameHeader::sensor2world_pose |
◆ sensor_info
◆ timestamp
| double apollo::perception::fusion::SensorFrameHeader::timestamp = 0.0 |
The documentation for this struct was generated from the following file: