#include <base_cipv.h>
◆ average_frame_rate
| float apollo::perception::camera::CipvInitOptions::average_frame_rate = 0.05f |
◆ average_lane_width_in_meter
| float apollo::perception::camera::CipvInitOptions::average_lane_width_in_meter = 3.7f |
◆ debug_level
| int apollo::perception::camera::CipvInitOptions::debug_level = 0 |
◆ image_based_cipv
| bool apollo::perception::camera::CipvInitOptions::image_based_cipv = false |
◆ max_vehicle_width_in_meter
| float apollo::perception::camera::CipvInitOptions::max_vehicle_width_in_meter = 1.87f |
◆ min_laneline_length_for_cipv
| float apollo::perception::camera::CipvInitOptions::min_laneline_length_for_cipv = 2.0f |
The documentation for this struct was generated from the following file:
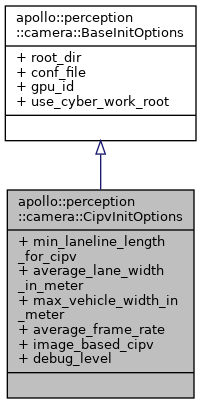
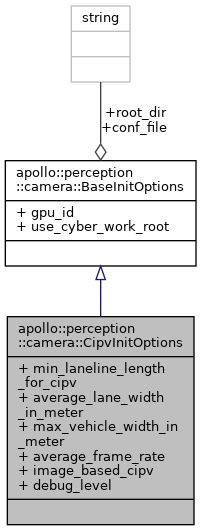
 Public Attributes inherited from apollo::perception::camera::BaseInitOptions
Public Attributes inherited from apollo::perception::camera::BaseInitOptions