#include <object.h>
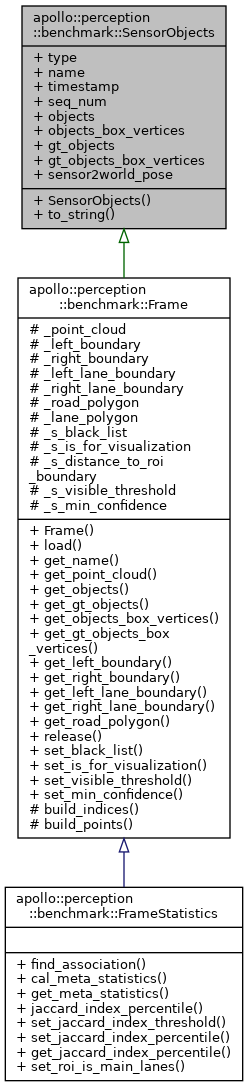
◆ SensorObjects()
| apollo::perception::benchmark::SensorObjects::SensorObjects |
( |
| ) |
|
|
inline |
◆ to_string()
| std::string apollo::perception::benchmark::SensorObjects::to_string |
( |
| ) |
const |
◆ gt_objects
| std::vector<ObjectPtr> apollo::perception::benchmark::SensorObjects::gt_objects |
◆ gt_objects_box_vertices
| std::vector<std::vector<Eigen::Vector3d> > apollo::perception::benchmark::SensorObjects::gt_objects_box_vertices |
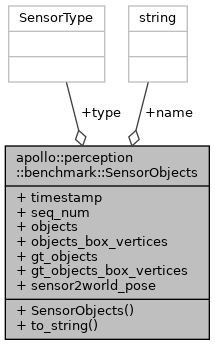
◆ name
| std::string apollo::perception::benchmark::SensorObjects::name |
◆ objects
| std::vector<ObjectPtr> apollo::perception::benchmark::SensorObjects::objects |
◆ objects_box_vertices
| std::vector<std::vector<Eigen::Vector3d> > apollo::perception::benchmark::SensorObjects::objects_box_vertices |
◆ sensor2world_pose
| Eigen::Matrix4d apollo::perception::benchmark::SensorObjects::sensor2world_pose |
◆ seq_num
| SeqId apollo::perception::benchmark::SensorObjects::seq_num = 0 |
◆ timestamp
| double apollo::perception::benchmark::SensorObjects::timestamp = 0.0 |
◆ type
The documentation for this struct was generated from the following file:
- modules/perception/tool/benchmark/lidar/util/object.h