#include <object.h>
◆ Object() [1/2]
| EIGEN_MAKE_ALIGNED_OPERATOR_NEW apollo::perception::benchmark::Object::Object |
( |
| ) |
|
◆ Object() [2/2]
| apollo::perception::benchmark::Object::Object |
( |
const Object & |
rhs | ) |
|
◆ clone()
| void apollo::perception::benchmark::Object::clone |
( |
const Object & |
rhs | ) |
|
◆ operator=()
| Object& apollo::perception::benchmark::Object::operator= |
( |
const Object & |
rhs | ) |
|
◆ to_string()
| std::string apollo::perception::benchmark::Object::to_string |
( |
| ) |
const |
◆ camera_supplement
◆ center
| Eigen::Vector3d apollo::perception::benchmark::Object::center |
◆ cloud
◆ confidence
| float apollo::perception::benchmark::Object::confidence = 1.f |
◆ direction
| Eigen::Vector3d apollo::perception::benchmark::Object::direction |
◆ height
| double apollo::perception::benchmark::Object::height = 0.0 |
◆ id
| int apollo::perception::benchmark::Object::id = 0 |
◆ indices
◆ internal_type
◆ internal_type_probs
| std::vector<float> apollo::perception::benchmark::Object::internal_type_probs |
◆ is_background
| bool apollo::perception::benchmark::Object::is_background = false |
◆ is_in_main_lanes
| bool apollo::perception::benchmark::Object::is_in_main_lanes = false |
◆ is_in_roi
| bool apollo::perception::benchmark::Object::is_in_roi = false |
◆ ji
| double apollo::perception::benchmark::Object::ji = 0.0 |
◆ latest_tracked_time
| double apollo::perception::benchmark::Object::latest_tracked_time = 0.0 |
◆ length
| double apollo::perception::benchmark::Object::length = 0.0 |
◆ lidar_supplement
◆ occluded
| double apollo::perception::benchmark::Object::occluded = 0.0 |
◆ pitch
| double apollo::perception::benchmark::Object::pitch = 0.0 |
◆ polygon
| PointCloud apollo::perception::benchmark::Object::polygon |
◆ radar_supplement
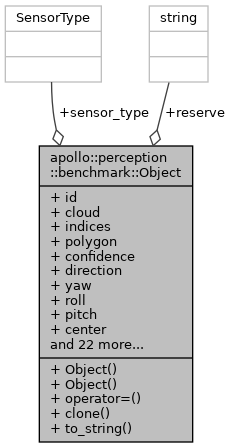
◆ reserve
| std::string apollo::perception::benchmark::Object::reserve |
◆ roll
| double apollo::perception::benchmark::Object::roll = 0.0 |
◆ sensor_type
◆ track_id
| int apollo::perception::benchmark::Object::track_id = 0 |
◆ tracking_time
| double apollo::perception::benchmark::Object::tracking_time = 0.0 |
◆ truncated
| double apollo::perception::benchmark::Object::truncated = 0.0 |
◆ type
◆ type_probs
| std::vector<float> apollo::perception::benchmark::Object::type_probs |
◆ velocity
| Eigen::Vector3d apollo::perception::benchmark::Object::velocity |
◆ visible
| bool apollo::perception::benchmark::Object::visible = true |
◆ visible_ratio
| float apollo::perception::benchmark::Object::visible_ratio = 1.f |
◆ width
| double apollo::perception::benchmark::Object::width = 0.0 |
◆ yaw
| double apollo::perception::benchmark::Object::yaw = 0.0 |
The documentation for this struct was generated from the following file:
- modules/perception/tool/benchmark/lidar/util/object.h