#include <traffic_light.h>
◆ crop_roi
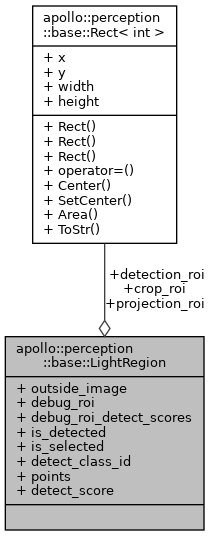
| Rect<int> apollo::perception::base::LightRegion::crop_roi |
◆ debug_roi
| std::vector<Rect<int> > apollo::perception::base::LightRegion::debug_roi |
◆ debug_roi_detect_scores
| std::vector<float> apollo::perception::base::LightRegion::debug_roi_detect_scores |
◆ detect_class_id
◆ detect_score
| float apollo::perception::base::LightRegion::detect_score = 0.0f |
◆ detection_roi
| Rect<int> apollo::perception::base::LightRegion::detection_roi |
◆ is_detected
| bool apollo::perception::base::LightRegion::is_detected = false |
◆ is_selected
| bool apollo::perception::base::LightRegion::is_selected = false |
◆ outside_image
| bool apollo::perception::base::LightRegion::outside_image = false |
◆ points
◆ projection_roi
| Rect<int> apollo::perception::base::LightRegion::projection_roi |
The documentation for this struct was generated from the following file: