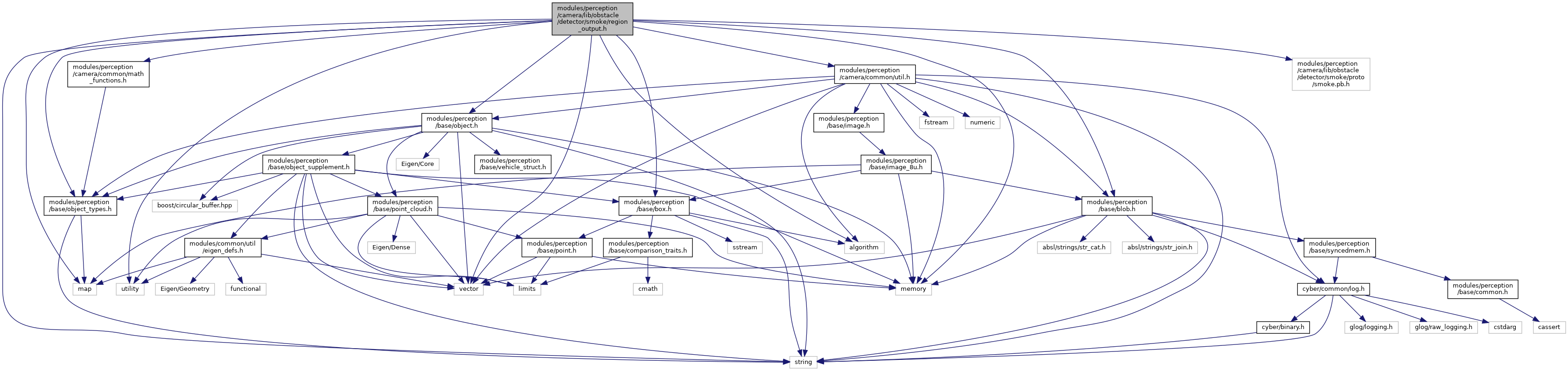
#include <algorithm>#include <map>#include <memory>#include <string>#include <utility>#include <vector>#include "modules/perception/base/blob.h"#include "modules/perception/base/box.h"#include "modules/perception/base/object.h"#include "modules/perception/base/object_types.h"#include "modules/perception/camera/common/math_functions.h"#include "modules/perception/camera/common/util.h"#include "modules/perception/camera/lib/obstacle/detector/smoke/proto/smoke.pb.h"
Include dependency graph for region_output.h:
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Namespaces | |
| apollo | |
| PlanningContext is the runtime context in planning. It is persistent across multiple frames. | |
| apollo::perception | |
| apollo::perception | |
| apollo::perception::camera | |
Functions | |
| int | apollo::perception::camera::get_smoke_objects_gpu () |
| void | apollo::perception::camera::get_smoke_objects_cpu (const SmokeBlobs &smoke_blobs, const std::vector< base::ObjectSubType > &types, const smoke::ModelParam &model_param, float light_vis_conf_threshold, float light_swt_conf_threshold, base::Blob< bool > *overlapped, base::Blob< int > *idx_sm, std::vector< base::ObjectPtr > *objects, int width, int height) |
| void | apollo::perception::camera::recover_smoke_bbox (int roi_w, int roi_h, int offset_y, std::vector< base::ObjectPtr > *objects) |
| void | apollo::perception::camera::filter_bbox (const SmokeMinDims &min_dims, std::vector< base::ObjectPtr > *objects) |
| void | apollo::perception::camera::fill_smoke_base (base::ObjectPtr obj, const float *bbox, int width, int height) |
| void | apollo::perception::camera::fill_smoke_bbox3d (bool with_bbox3d, base::ObjectPtr obj, const float *bbox) |
| base::ObjectSubType | apollo::perception::camera::get_smoke_object_subtype (int cls) |
