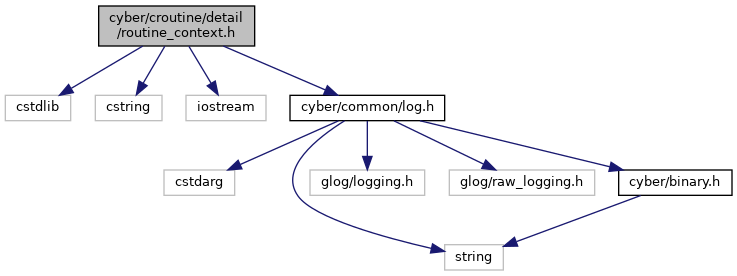
Include dependency graph for routine_context.h:
This graph shows which files directly or indirectly include this file:

Go to the source code of this file.
Classes | |
| struct | apollo::cyber::croutine::RoutineContext |
Namespaces | |
| apollo | |
| PlanningContext is the runtime context in planning. It is persistent across multiple frames. | |
| apollo::cyber | |
| apollo::cyber::croutine | |
Typedefs | |
| typedef void(* | apollo::cyber::croutine::func) (void *) |
Functions | |
| void | ctx_swap (void **, void **) asm("ctx_swap") |
| void | apollo::cyber::croutine::MakeContext (const func &f1, const void *arg, RoutineContext *ctx) |
| void | apollo::cyber::croutine::SwapContext (char **src_sp, char **dest_sp) |
Variables | |
| constexpr size_t | apollo::cyber::croutine::STACK_SIZE = 2 * 1024 * 1024 |
| constexpr size_t | apollo::cyber::croutine::REGISTERS_SIZE = 56 |
Function Documentation
◆ ctx_swap()
| void ctx_swap | ( | void ** | , |
| void ** | |||
| ) |
