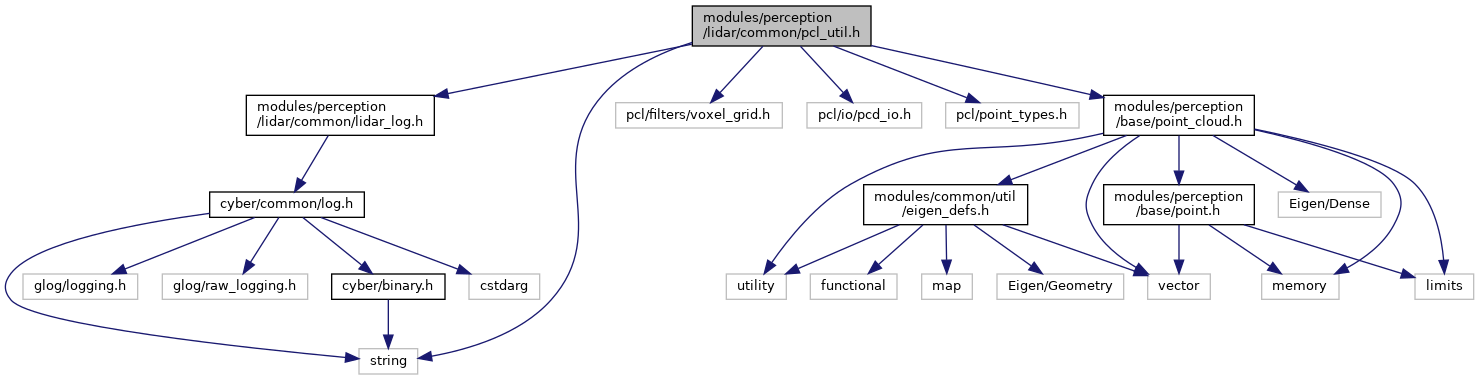
#include <string>#include "pcl/filters/voxel_grid.h"#include "pcl/io/pcd_io.h"#include "pcl/point_types.h"#include "modules/perception/base/point_cloud.h"#include "modules/perception/lidar/common/lidar_log.h"
Include dependency graph for pcl_util.h:
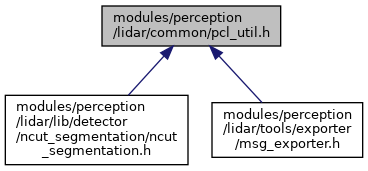
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| struct | apollo::perception::lidar::PCLPointXYZIT |
| struct | apollo::perception::lidar::PCLPointXYZL |
Namespaces | |
| apollo | |
| PlanningContext is the runtime context in planning. It is persistent across multiple frames. | |
| apollo::perception | |
| apollo::perception | |
| apollo::perception::lidar | |
Typedefs | |
| typedef pcl::PointXYZRGB | apollo::perception::lidar::CPoint |
| typedef pcl::PointCloud< CPoint > | apollo::perception::lidar::CPointCloud |
| typedef pcl::PointCloud< CPoint >::Ptr | apollo::perception::lidar::CPointCloudPtr |
| typedef pcl::PointCloud< CPoint >::ConstPtr | apollo::perception::lidar::CPointCloudConstPtr |
Functions | |
| bool | apollo::perception::lidar::LoadPCLPCD (const std::string &file_path, base::PointFCloud *cloud_out) |
| template<typename PointT > | |
| void | apollo::perception::lidar::TransformToPCLXYZI (const base::AttributePointCloud< PointT > &org_cloud, const pcl::PointCloud< pcl::PointXYZI >::Ptr &out_cloud_ptr) |
| void | apollo::perception::lidar::TransformFromPCLXYZI (const pcl::PointCloud< pcl::PointXYZI >::Ptr &org_cloud_ptr, const base::PointFCloudPtr &out_cloud_ptr) |
| void | apollo::perception::lidar::DownSampleCloudByVoxelGrid (const pcl::PointCloud< pcl::PointXYZI >::Ptr &cloud_ptr, const pcl::PointCloud< pcl::PointXYZI >::Ptr &filtered_cloud_ptr, float lx=0.01f, float ly=0.01f, float lz=0.01f) |
Variables | |
| struct apollo::perception::lidar::PCLPointXYZIT | apollo::perception::lidar::EIGEN_ALIGN16 |
