This file provides the declaration of the class "NaviPathDecider". More...
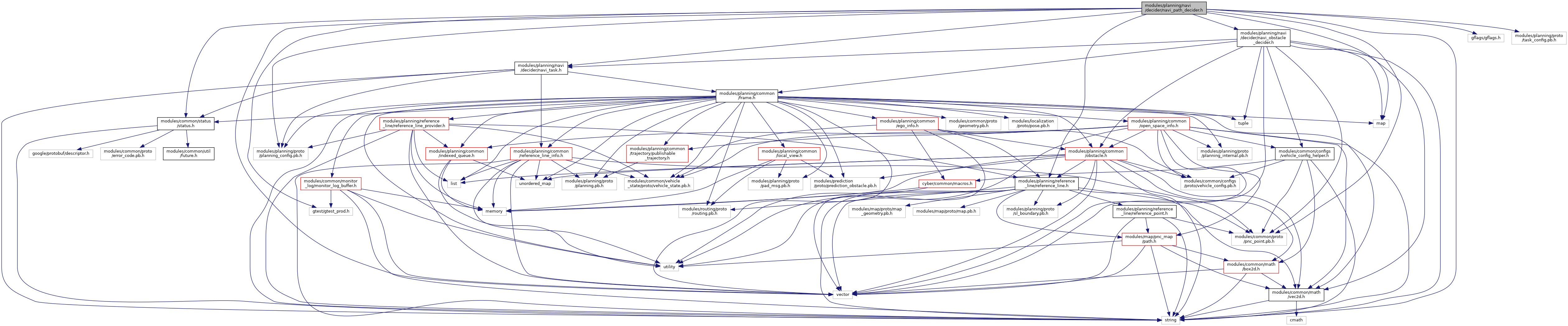
#include <map>#include <string>#include <vector>#include "gflags/gflags.h"#include "gtest/gtest_prod.h"#include "modules/common/proto/pnc_point.pb.h"#include "modules/common/status/status.h"#include "modules/planning/navi/decider/navi_obstacle_decider.h"#include "modules/planning/navi/decider/navi_task.h"#include "modules/planning/proto/planning_config.pb.h"#include "modules/planning/proto/task_config.pb.h"#include "modules/planning/reference_line/reference_line.h"
Include dependency graph for navi_path_decider.h:
Go to the source code of this file.
Classes | |
| class | apollo::planning::NaviPathDecider |
| NaviPathDecider is used to generate the local driving path of the .* vehicle in navigation mode. Note that NaviPathDecider is only used in navigation mode (turn on navigation mode by setting "FLAGS_use_navigation_mode" to "true") and do not use it in standard mode. More... | |
Namespaces | |
| apollo::planning | |
| apollo::planning | |
| apollo | |
| PlanningContext is the runtime context in planning. It is persistent across multiple frames. | |
Detailed Description
This file provides the declaration of the class "NaviPathDecider".
