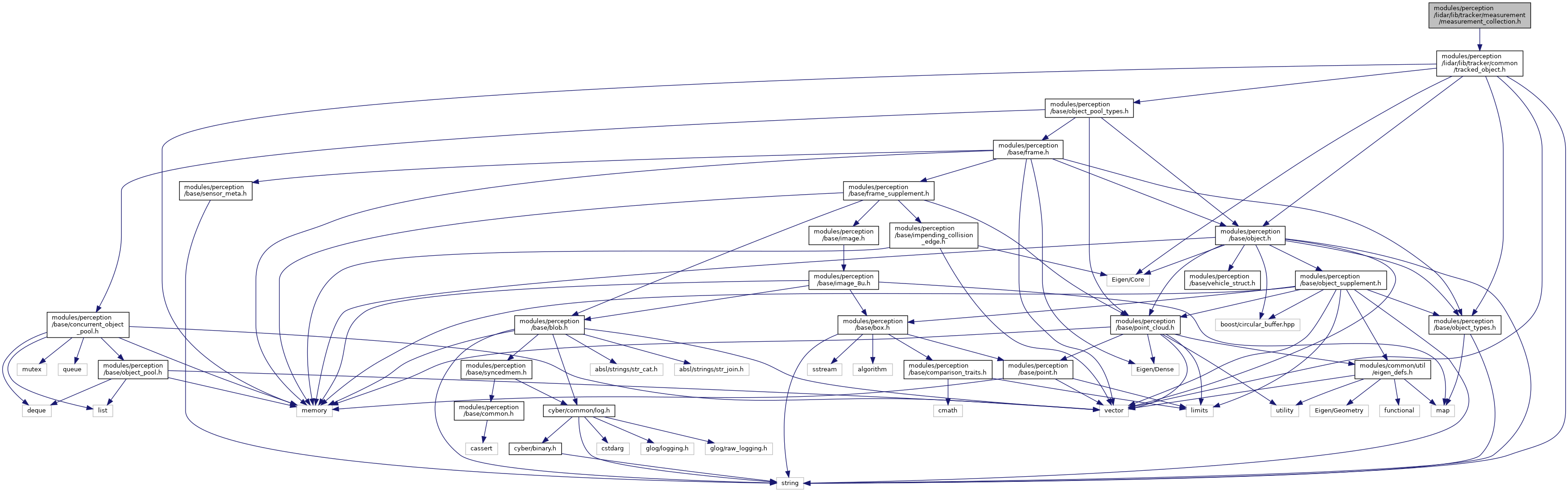
Include dependency graph for measurement_collection.h:
Go to the source code of this file.
Namespaces | |
| apollo | |
| PlanningContext is the runtime context in planning. It is persistent across multiple frames. | |
| apollo::perception | |
| apollo::perception | |
| apollo::perception::lidar | |
Functions | |
| void | apollo::perception::lidar::MeasureAnchorPointVelocity (TrackedObjectPtr new_object, const TrackedObjectConstPtr &old_object, const double &time_diff) |
| void | apollo::perception::lidar::MeasureBboxCenterVelocity (TrackedObjectPtr new_object, const TrackedObjectConstPtr &old_object, const double &time_diff) |
| void | apollo::perception::lidar::MeasureBboxCornerVelocity (TrackedObjectPtr new_object, const TrackedObjectConstPtr &old_object, const double &time_diff) |
