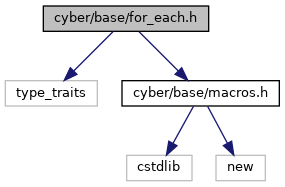
Include dependency graph for for_each.h:
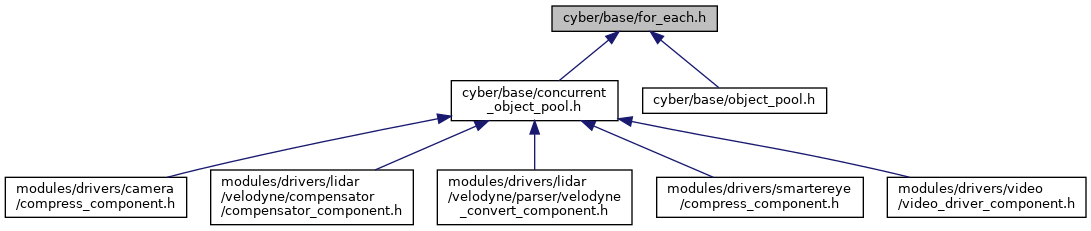
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| class | apollo::cyber::base::std |
Namespaces | |
| apollo | |
| PlanningContext is the runtime context in planning. It is persistent across multiple frames. | |
| apollo::cyber | |
| apollo::cyber::base | |
Macros | |
| #define | FOR_EACH(i, begin, end) |
Functions | |
| apollo::cyber::base::DEFINE_TYPE_TRAIT (HasLess, operator<) template< class Value | |
| apollo::cyber::base::std enable_if ::type LessThan const Value val, const End end | apollo::cyber::base::LessThan (const Value &val, const End &end) |
Variables | |
| apollo::cyber::base::std | apollo::cyber::base::Value |
| apollo::cyber::base::std | apollo::cyber::base::value |
Macro Definition Documentation
◆ FOR_EACH
| #define FOR_EACH | ( | i, | |
| begin, | |||
| end | |||
| ) |
Value:
apollo::cyber::base::LessThan(i, (end)); ++i)
apollo::cyber::base::std enable_if ::type LessThan const Value val, const End end LessThan(const Value &val, const End &end)
Definition: for_each.h:40
