#include <waypoint_sampler.h>
◆ WaypointSampler()
| apollo::planning::WaypointSampler::WaypointSampler |
( |
const WaypointSamplerConfig & |
config | ) |
|
|
inlineexplicit |
◆ ~WaypointSampler()
| virtual apollo::planning::WaypointSampler::~WaypointSampler |
( |
| ) |
|
|
virtualdefault |
◆ Init()
| virtual void apollo::planning::WaypointSampler::Init |
( |
const ReferenceLineInfo * |
reference_line_info, |
|
|
const common::SLPoint & |
init_sl_point_, |
|
|
const common::FrenetFramePoint & |
init_frenet_frame_point |
|
) |
| |
|
virtual |
◆ SamplePathWaypoints()
| virtual bool apollo::planning::WaypointSampler::SamplePathWaypoints |
( |
const common::TrajectoryPoint & |
init_point, |
|
|
std::vector< std::vector< common::SLPoint >> *const |
points |
|
) |
| |
|
virtual |
◆ SetDebugLogger()
| virtual void apollo::planning::WaypointSampler::SetDebugLogger |
( |
apollo::planning_internal::Debug * |
debug | ) |
|
|
inlinevirtual |
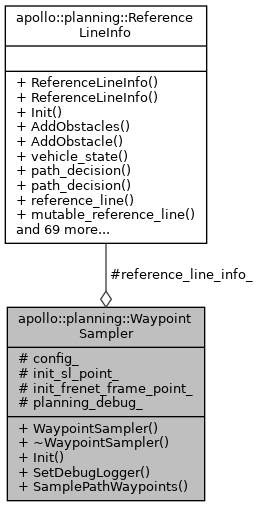
◆ config_
| const WaypointSamplerConfig& apollo::planning::WaypointSampler::config_ |
|
protected |
◆ init_frenet_frame_point_
| common::FrenetFramePoint apollo::planning::WaypointSampler::init_frenet_frame_point_ |
|
protected |
◆ init_sl_point_
| common::SLPoint apollo::planning::WaypointSampler::init_sl_point_ |
|
protected |
◆ planning_debug_
| apollo::planning_internal::Debug* apollo::planning::WaypointSampler::planning_debug_ = nullptr |
|
protected |
◆ reference_line_info_
| const ReferenceLineInfo* apollo::planning::WaypointSampler::reference_line_info_ = nullptr |
|
protected |
The documentation for this class was generated from the following file: