#include <piecewise_jerk_problem.h>
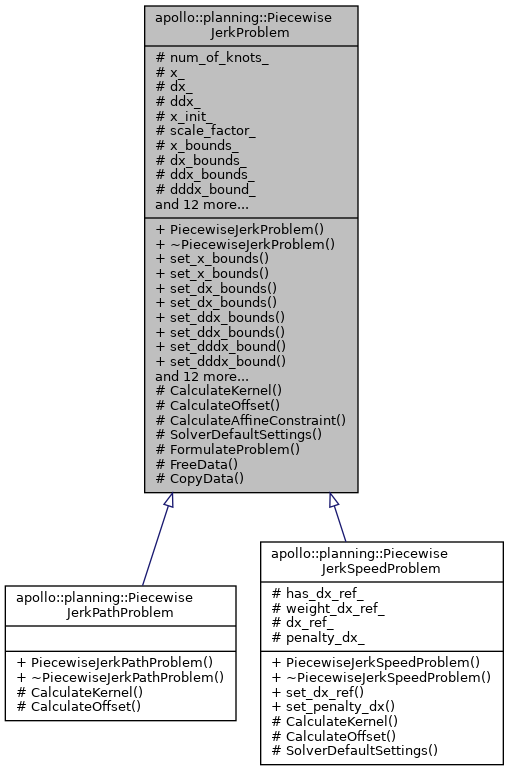
Inheritance diagram for apollo::planning::PiecewiseJerkProblem:
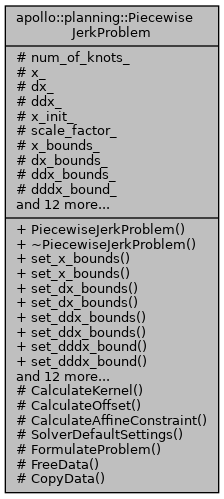
Collaboration diagram for apollo::planning::PiecewiseJerkProblem:
Public Member Functions | |
| PiecewiseJerkProblem (const size_t num_of_knots, const double delta_s, const std::array< double, 3 > &x_init) | |
| virtual | ~PiecewiseJerkProblem ()=default |
| void | set_x_bounds (std::vector< std::pair< double, double >> x_bounds) |
| void | set_x_bounds (const double x_lower_bound, const double x_upper_bound) |
| void | set_dx_bounds (std::vector< std::pair< double, double >> dx_bounds) |
| void | set_dx_bounds (const double dx_lower_bound, const double dx_upper_bound) |
| void | set_ddx_bounds (std::vector< std::pair< double, double >> ddx_bounds) |
| void | set_ddx_bounds (const double ddx_lower_bound, const double ddx_upper_bound) |
| void | set_dddx_bound (const double dddx_bound) |
| void | set_dddx_bound (const double dddx_lower_bound, const double dddx_upper_bound) |
| void | set_weight_x (const double weight_x) |
| void | set_weight_dx (const double weight_dx) |
| void | set_weight_ddx (const double weight_ddx) |
| void | set_weight_dddx (const double weight_dddx) |
| void | set_scale_factor (const std::array< double, 3 > &scale_factor) |
| void | set_x_ref (const double weight_x_ref, std::vector< double > x_ref) |
| Set the x ref object and the uniform x_ref weighting. More... | |
| void | set_x_ref (std::vector< double > weight_x_ref_vec, std::vector< double > x_ref) |
| Set the x ref object and piecewised x_ref weightings. More... | |
| void | set_end_state_ref (const std::array< double, 3 > &weight_end_state, const std::array< double, 3 > &end_state_ref) |
| virtual bool | Optimize (const int max_iter=4000) |
| const std::vector< double > & | opt_x () const |
| const std::vector< double > & | opt_dx () const |
| const std::vector< double > & | opt_ddx () const |
Protected Member Functions | |
| virtual void | CalculateKernel (std::vector< c_float > *P_data, std::vector< c_int > *P_indices, std::vector< c_int > *P_indptr)=0 |
| virtual void | CalculateOffset (std::vector< c_float > *q)=0 |
| virtual void | CalculateAffineConstraint (std::vector< c_float > *A_data, std::vector< c_int > *A_indices, std::vector< c_int > *A_indptr, std::vector< c_float > *lower_bounds, std::vector< c_float > *upper_bounds) |
| virtual OSQPSettings * | SolverDefaultSettings () |
| OSQPData * | FormulateProblem () |
| void | FreeData (OSQPData *data) |
| template<typename T > | |
| T * | CopyData (const std::vector< T > &vec) |
Protected Attributes | |
| size_t | num_of_knots_ = 0 |
| std::vector< double > | x_ |
| std::vector< double > | dx_ |
| std::vector< double > | ddx_ |
| std::array< double, 3 > | x_init_ |
| std::array< double, 3 > | scale_factor_ = {{1.0, 1.0, 1.0}} |
| std::vector< std::pair< double, double > > | x_bounds_ |
| std::vector< std::pair< double, double > > | dx_bounds_ |
| std::vector< std::pair< double, double > > | ddx_bounds_ |
| std::pair< double, double > | dddx_bound_ |
| double | weight_x_ = 0.0 |
| double | weight_dx_ = 0.0 |
| double | weight_ddx_ = 0.0 |
| double | weight_dddx_ = 0.0 |
| double | delta_s_ = 1.0 |
| bool | has_x_ref_ = false |
| double | weight_x_ref_ = 0.0 |
| std::vector< double > | x_ref_ |
| std::vector< double > | weight_x_ref_vec_ |
| bool | has_end_state_ref_ = false |
| std::array< double, 3 > | weight_end_state_ = {{0.0, 0.0, 0.0}} |
| std::array< double, 3 > | end_state_ref_ |
Constructor & Destructor Documentation
◆ PiecewiseJerkProblem()
| apollo::planning::PiecewiseJerkProblem::PiecewiseJerkProblem | ( | const size_t | num_of_knots, |
| const double | delta_s, | ||
| const std::array< double, 3 > & | x_init | ||
| ) |
◆ ~PiecewiseJerkProblem()
|
virtualdefault |
Member Function Documentation
◆ CalculateAffineConstraint()
|
protectedvirtual |
◆ CalculateKernel()
|
protectedpure virtual |
Implemented in apollo::planning::PiecewiseJerkSpeedProblem, and apollo::planning::PiecewiseJerkPathProblem.
◆ CalculateOffset()
|
protectedpure virtual |
Implemented in apollo::planning::PiecewiseJerkSpeedProblem, and apollo::planning::PiecewiseJerkPathProblem.
◆ CopyData()
template<typename T >
|
inlineprotected |
◆ FormulateProblem()
|
protected |
◆ FreeData()
|
protected |
◆ opt_ddx()
|
inline |
◆ opt_dx()
|
inline |
◆ opt_x()
|
inline |
◆ Optimize()
|
virtual |
◆ set_dddx_bound() [1/2]
|
inline |
◆ set_dddx_bound() [2/2]
|
inline |
◆ set_ddx_bounds() [1/2]
| void apollo::planning::PiecewiseJerkProblem::set_ddx_bounds | ( | std::vector< std::pair< double, double >> | ddx_bounds | ) |
◆ set_ddx_bounds() [2/2]
| void apollo::planning::PiecewiseJerkProblem::set_ddx_bounds | ( | const double | ddx_lower_bound, |
| const double | ddx_upper_bound | ||
| ) |
◆ set_dx_bounds() [1/2]
| void apollo::planning::PiecewiseJerkProblem::set_dx_bounds | ( | std::vector< std::pair< double, double >> | dx_bounds | ) |
◆ set_dx_bounds() [2/2]
| void apollo::planning::PiecewiseJerkProblem::set_dx_bounds | ( | const double | dx_lower_bound, |
| const double | dx_upper_bound | ||
| ) |
◆ set_end_state_ref()
| void apollo::planning::PiecewiseJerkProblem::set_end_state_ref | ( | const std::array< double, 3 > & | weight_end_state, |
| const std::array< double, 3 > & | end_state_ref | ||
| ) |
◆ set_scale_factor()
|
inline |
◆ set_weight_dddx()
|
inline |
◆ set_weight_ddx()
|
inline |
◆ set_weight_dx()
|
inline |
◆ set_weight_x()
|
inline |
◆ set_x_bounds() [1/2]
| void apollo::planning::PiecewiseJerkProblem::set_x_bounds | ( | std::vector< std::pair< double, double >> | x_bounds | ) |
◆ set_x_bounds() [2/2]
| void apollo::planning::PiecewiseJerkProblem::set_x_bounds | ( | const double | x_lower_bound, |
| const double | x_upper_bound | ||
| ) |
◆ set_x_ref() [1/2]
| void apollo::planning::PiecewiseJerkProblem::set_x_ref | ( | const double | weight_x_ref, |
| std::vector< double > | x_ref | ||
| ) |
Set the x ref object and the uniform x_ref weighting.
- Parameters
-
weight_x_ref uniform weighting for x_ref x_ref objective value of x
◆ set_x_ref() [2/2]
| void apollo::planning::PiecewiseJerkProblem::set_x_ref | ( | std::vector< double > | weight_x_ref_vec, |
| std::vector< double > | x_ref | ||
| ) |
Set the x ref object and piecewised x_ref weightings.
- Parameters
-
weight_x_ref_vec piecewised x_ref weightings x_ref objective value of x
◆ SolverDefaultSettings()
|
protectedvirtual |
Reimplemented in apollo::planning::PiecewiseJerkSpeedProblem.
Member Data Documentation
◆ dddx_bound_
|
protected |
◆ ddx_
|
protected |
◆ ddx_bounds_
|
protected |
◆ delta_s_
|
protected |
◆ dx_
|
protected |
◆ dx_bounds_
|
protected |
◆ end_state_ref_
|
protected |
◆ has_end_state_ref_
|
protected |
◆ has_x_ref_
|
protected |
◆ num_of_knots_
|
protected |
◆ scale_factor_
|
protected |
◆ weight_dddx_
|
protected |
◆ weight_ddx_
|
protected |
◆ weight_dx_
|
protected |
◆ weight_end_state_
|
protected |
◆ weight_x_
|
protected |
◆ weight_x_ref_
|
protected |
◆ weight_x_ref_vec_
|
protected |
◆ x_
|
protected |
◆ x_bounds_
|
protected |
◆ x_init_
|
protected |
◆ x_ref_
|
protected |
The documentation for this class was generated from the following file:
- modules/planning/math/piecewise_jerk/piecewise_jerk_problem.h
