#include <inner_component_messages.h>
◆ SensorFrameMessage()
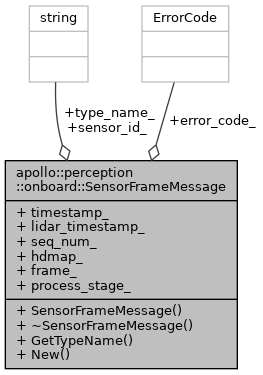
| apollo::perception::onboard::SensorFrameMessage::SensorFrameMessage |
( |
| ) |
|
|
inline |
◆ ~SensorFrameMessage()
| apollo::perception::onboard::SensorFrameMessage::~SensorFrameMessage |
( |
| ) |
|
|
default |
◆ GetTypeName()
| std::string apollo::perception::onboard::SensorFrameMessage::GetTypeName |
( |
| ) |
|
|
inline |
◆ New()
◆ error_code_
| apollo::common::ErrorCode apollo::perception::onboard::SensorFrameMessage::error_code_ = apollo::common::ErrorCode::OK |
◆ frame_
| base::FramePtr apollo::perception::onboard::SensorFrameMessage::frame_ |
◆ hdmap_
◆ lidar_timestamp_
| uint64_t apollo::perception::onboard::SensorFrameMessage::lidar_timestamp_ = 0 |
◆ process_stage_
◆ sensor_id_
| std::string apollo::perception::onboard::SensorFrameMessage::sensor_id_ |
◆ seq_num_
| uint32_t apollo::perception::onboard::SensorFrameMessage::seq_num_ = 0 |
◆ timestamp_
| double apollo::perception::onboard::SensorFrameMessage::timestamp_ = 0.0 |
◆ type_name_
| std::string apollo::perception::onboard::SensorFrameMessage::type_name_ |
The documentation for this class was generated from the following file: