#include <roi_service.h>
◆ Vec2ui
◆ DirectionMajor
◆ ROIServiceContent()
| apollo::perception::lidar::ROIServiceContent::ROIServiceContent |
( |
| ) |
|
|
default |
◆ ~ROIServiceContent()
| apollo::perception::lidar::ROIServiceContent::~ROIServiceContent |
( |
| ) |
|
|
default |
◆ Check()
| bool apollo::perception::lidar::ROIServiceContent::Check |
( |
const Eigen::Vector3d & |
world_point | ) |
const |
◆ CheckBit()
| bool apollo::perception::lidar::ROIServiceContent::CheckBit |
( |
const size_t |
loc, |
|
|
const uint64_t |
block |
|
) |
| const |
|
inline |
◆ GetCopy()
| void apollo::perception::lidar::ROIServiceContent::GetCopy |
( |
SceneServiceContent * |
content | ) |
const |
|
overridevirtual |
◆ Name()
| std::string apollo::perception::lidar::ROIServiceContent::Name |
( |
| ) |
const |
|
inlineoverridevirtual |
◆ SetContent()
| void apollo::perception::lidar::ROIServiceContent::SetContent |
( |
const SceneServiceContent & |
content | ) |
|
|
overridevirtual |
◆ bitmap_
| std::vector<uint64_t> apollo::perception::lidar::ROIServiceContent::bitmap_ |
◆ cell_size_
| double apollo::perception::lidar::ROIServiceContent::cell_size_ = 0.25 |
◆ major_dir_
◆ map_size_
| Vec2ui apollo::perception::lidar::ROIServiceContent::map_size_ |
◆ range_
| double apollo::perception::lidar::ROIServiceContent::range_ = 120.0 |
◆ transform_
| Eigen::Vector3d apollo::perception::lidar::ROIServiceContent::transform_ |
The documentation for this class was generated from the following file:
- modules/perception/lidar/lib/scene_manager/roi_service/roi_service.h
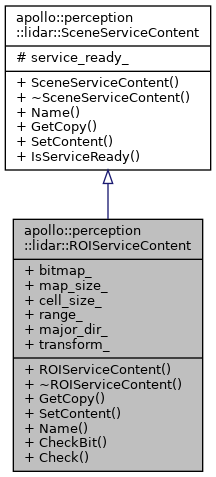
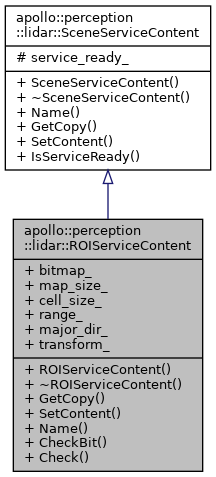
 Public Member Functions inherited from apollo::perception::lidar::SceneServiceContent
Public Member Functions inherited from apollo::perception::lidar::SceneServiceContent