#include <onnx_obstacle_detector.h>
◆ OnnxObstacleDetector() [1/2]
| apollo::perception::inference::OnnxObstacleDetector::OnnxObstacleDetector |
( |
const std::string & |
model_file, |
|
|
const float |
score_threshold, |
|
|
const std::vector< std::string > & |
outputs, |
|
|
const std::vector< std::string > & |
inputs |
|
) |
| |
◆ OnnxObstacleDetector() [2/2]
| apollo::perception::inference::OnnxObstacleDetector::OnnxObstacleDetector |
( |
const std::string & |
model_file, |
|
|
const std::vector< std::string > & |
outputs, |
|
|
const std::vector< std::string > & |
inputs |
|
) |
| |
◆ ~OnnxObstacleDetector()
| virtual apollo::perception::inference::OnnxObstacleDetector::~OnnxObstacleDetector |
( |
| ) |
|
|
virtual |
◆ get_blob()
| BlobPtr apollo::perception::inference::OnnxObstacleDetector::get_blob |
( |
const std::string & |
name | ) |
|
|
overridevirtual |
◆ Infer()
| void apollo::perception::inference::OnnxObstacleDetector::Infer |
( |
| ) |
|
|
overridevirtual |
◆ inference()
| void apollo::perception::inference::OnnxObstacleDetector::inference |
( |
| ) |
|
◆ Init()
| bool apollo::perception::inference::OnnxObstacleDetector::Init |
( |
const std::map< std::string, std::vector< int >> & |
shapes | ) |
|
|
overridevirtual |
◆ OnnxToTRTModel()
| void apollo::perception::inference::OnnxObstacleDetector::OnnxToTRTModel |
( |
const std::string & |
model_file, |
|
|
nvinfer1::ICudaEngine ** |
engine_ptr |
|
) |
| |
Convert ONNX to TensorRT model.
- Parameters
-
| [in] | model_file | ONNX model file path |
| [out] | engine_ptr | TensorRT model engine made out of ONNX model |
Load ONNX model, and convert it to TensorRT model
The documentation for this class was generated from the following file:
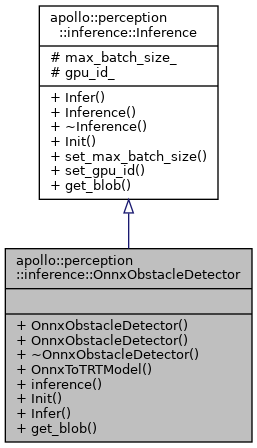
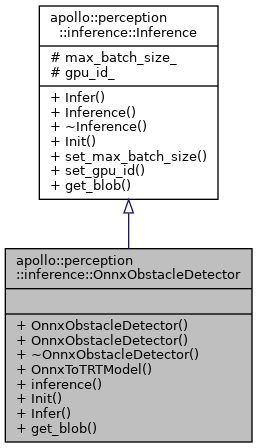
 Public Member Functions inherited from apollo::perception::inference::Inference
Public Member Functions inherited from apollo::perception::inference::Inference