#include <point_cloud.h>
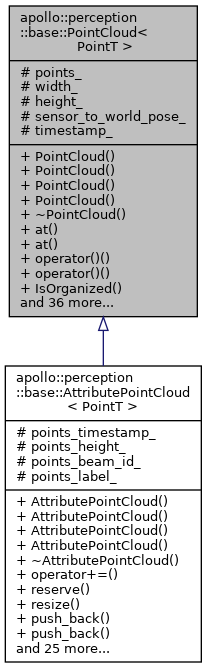
Inheritance diagram for apollo::perception::base::PointCloud< PointT >:
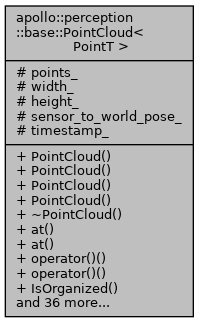
Collaboration diagram for apollo::perception::base::PointCloud< PointT >:
Public Types | |
| using | PointType = PointT |
| typedef std::vector< PointT >::iterator | iterator |
| typedef std::vector< PointT >::const_iterator | const_iterator |
Public Member Functions | |
| PointCloud ()=default | |
| PointCloud (const PointCloud< PointT > &pc, const PointIndices &indices) | |
| PointCloud (const PointCloud< PointT > &pc, const std::vector< int > &indices) | |
| PointCloud (size_t width, size_t height, PointT point=PointT()) | |
| virtual | ~PointCloud ()=default |
| const PointT * | at (size_t col, size_t row) const |
| PointT * | at (size_t col, size_t row) |
| const PointT * | operator() (size_t col, size_t row) const |
| PointT * | operator() (size_t col, size_t row) |
| bool | IsOrganized () const |
| size_t | height () const |
| size_t | width () const |
| size_t | size () const |
| virtual void | reserve (size_t size) |
| bool | empty () const |
| virtual void | resize (size_t size) |
| const PointT & | operator[] (size_t n) const |
| PointT & | operator[] (size_t n) |
| const PointT & | at (size_t n) const |
| PointT & | at (size_t n) |
| const PointT & | front () const |
| PointT & | front () |
| const PointT & | back () const |
| PointT & | back () |
| virtual void | push_back (const PointT &point) |
| virtual void | clear () |
| virtual bool | SwapPoint (size_t source_id, size_t target_id) |
| bool | CopyPoint (size_t id, size_t rhs_id, const PointCloud< PointT > &rhs) |
| void | CopyPointCloud (const PointCloud< PointT > &rhs, const PointIndices &indices) |
| template<typename IndexType > | |
| void | CopyPointCloud (const PointCloud< PointT > &rhs, const std::vector< IndexType > &indices) |
| template<typename IndexType > | |
| void | CopyPointCloudExclude (const PointCloud< PointT > &rhs, const std::vector< IndexType > &indices) |
| void | SwapPointCloud (PointCloud< PointT > *rhs) |
| iterator | begin () |
| iterator | end () |
| const_iterator | begin () const |
| const_iterator | end () const |
| std::vector< PointT > * | mutable_points () |
| const std::vector< PointT > & | points () const |
| void | set_timestamp (const double timestamp) |
| double | get_timestamp () |
| void | set_sensor_to_world_pose (const Eigen::Affine3d &sensor_to_world_pose) |
| const Eigen::Affine3d & | sensor_to_world_pose () |
| void | RotatePointCloud (bool check_nan=false) |
| void | TransformPointCloud (bool check_nan=false) |
| void | TransformPointCloud (const Eigen::Affine3f &transform, PointCloud< PointT > *out, bool check_nan=false) const |
| virtual bool | CheckConsistency () const |
Protected Attributes | |
| std::vector< PointT > | points_ |
| size_t | width_ = 0 |
| size_t | height_ = 0 |
| Eigen::Affine3d | sensor_to_world_pose_ = Eigen::Affine3d::Identity() |
| double | timestamp_ = 0.0 |
Member Typedef Documentation
◆ const_iterator
template<class PointT>
| typedef std::vector<PointT>::const_iterator apollo::perception::base::PointCloud< PointT >::const_iterator |
◆ iterator
template<class PointT>
| typedef std::vector<PointT>::iterator apollo::perception::base::PointCloud< PointT >::iterator |
◆ PointType
template<class PointT>
| using apollo::perception::base::PointCloud< PointT >::PointType = PointT |
Constructor & Destructor Documentation
◆ PointCloud() [1/4]
template<class PointT>
|
default |
◆ PointCloud() [2/4]
template<class PointT>
|
inline |
◆ PointCloud() [3/4]
template<class PointT>
|
inline |
◆ PointCloud() [4/4]
template<class PointT>
|
inline |
◆ ~PointCloud()
template<class PointT>
|
virtualdefault |
Member Function Documentation
◆ at() [1/4]
template<class PointT>
|
inline |
◆ at() [2/4]
template<class PointT>
|
inline |
◆ at() [3/4]
template<class PointT>
|
inline |
◆ at() [4/4]
template<class PointT>
|
inline |
◆ back() [1/2]
template<class PointT>
|
inline |
◆ back() [2/2]
template<class PointT>
|
inline |
◆ begin() [1/2]
template<class PointT>
|
inline |
◆ begin() [2/2]
template<class PointT>
|
inline |
◆ CheckConsistency()
template<class PointT>
|
inlinevirtual |
◆ clear()
template<class PointT>
|
inlinevirtual |
◆ CopyPoint()
template<class PointT>
|
inline |
◆ CopyPointCloud() [1/2]
template<class PointT>
|
inline |
◆ CopyPointCloud() [2/2]
template<class PointT>
template<typename IndexType >
|
inline |
◆ CopyPointCloudExclude()
template<class PointT>
template<typename IndexType >
|
inline |
◆ empty()
template<class PointT>
|
inline |
◆ end() [1/2]
template<class PointT>
|
inline |
◆ end() [2/2]
template<class PointT>
|
inline |
◆ front() [1/2]
template<class PointT>
|
inline |
◆ front() [2/2]
template<class PointT>
|
inline |
◆ get_timestamp()
template<class PointT>
|
inline |
◆ height()
template<class PointT>
|
inline |
◆ IsOrganized()
template<class PointT>
|
inline |
◆ mutable_points()
template<class PointT>
|
inline |
◆ operator()() [1/2]
template<class PointT>
|
inline |
◆ operator()() [2/2]
template<class PointT>
|
inline |
◆ operator[]() [1/2]
template<class PointT>
|
inline |
◆ operator[]() [2/2]
template<class PointT>
|
inline |
◆ points()
template<class PointT>
|
inline |
◆ push_back()
template<class PointT>
|
inlinevirtual |
◆ reserve()
template<class PointT>
|
inlinevirtual |
◆ resize()
template<class PointT>
|
inlinevirtual |
◆ RotatePointCloud()
template<class PointT>
|
inline |
◆ sensor_to_world_pose()
template<class PointT>
|
inline |
◆ set_sensor_to_world_pose()
template<class PointT>
|
inline |
◆ set_timestamp()
template<class PointT>
|
inline |
◆ size()
template<class PointT>
|
inline |
◆ SwapPoint()
template<class PointT>
|
inlinevirtual |
◆ SwapPointCloud()
template<class PointT>
|
inline |
◆ TransformPointCloud() [1/2]
template<class PointT>
|
inline |
◆ TransformPointCloud() [2/2]
template<class PointT>
|
inline |
◆ width()
template<class PointT>
|
inline |
Member Data Documentation
◆ height_
template<class PointT>
|
protected |
◆ points_
template<class PointT>
|
protected |
◆ sensor_to_world_pose_
template<class PointT>
|
protected |
◆ timestamp_
template<class PointT>
|
protected |
◆ width_
template<class PointT>
|
protected |
The documentation for this class was generated from the following file:
- modules/perception/base/point_cloud.h
