Topology Manager of Node related. More...
#include <node_manager.h>
Inheritance diagram for apollo::cyber::service_discovery::NodeManager:
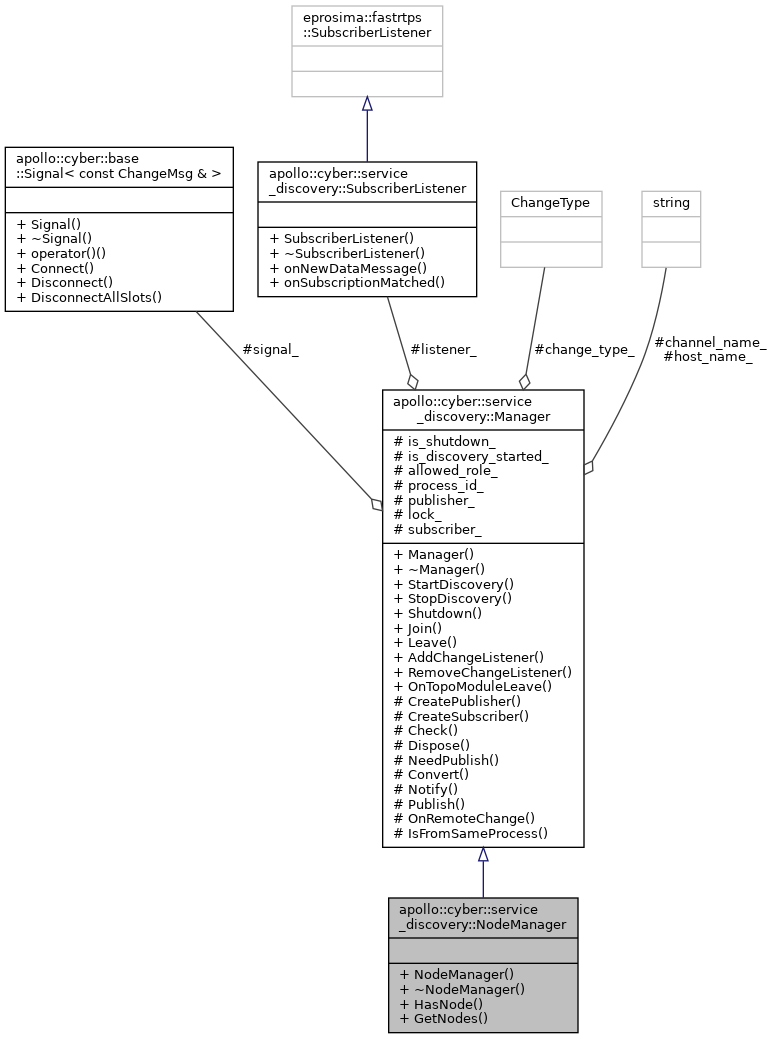
Collaboration diagram for apollo::cyber::service_discovery::NodeManager:
Public Types | |
| using | RoleAttrVec = std::vector< RoleAttributes > |
| using | NodeWarehouse = SingleValueWarehouse |
 Public Types inherited from apollo::cyber::service_discovery::Manager Public Types inherited from apollo::cyber::service_discovery::Manager | |
| using | ChangeSignal = base::Signal< const ChangeMsg & > |
| using | ChangeFunc = std::function< void(const ChangeMsg &)> |
| using | ChangeConnection = base::Connection< const ChangeMsg & > |
| using | RtpsParticipant = eprosima::fastrtps::Participant |
| using | RtpsPublisherAttr = eprosima::fastrtps::PublisherAttributes |
| using | RtpsSubscriberAttr = eprosima::fastrtps::SubscriberAttributes |
Public Member Functions | |
| NodeManager () | |
| Construct a new Node Manager object. More... | |
| virtual | ~NodeManager () |
| Destroy the Node Manager object. More... | |
| bool | HasNode (const std::string &node_name) |
Checkout whether we have node_name in topology. More... | |
| void | GetNodes (RoleAttrVec *nodes) |
| Get the Nodes object. More... | |
| Public Member Functions inherited from apollo::cyber::service_discovery::Manager | |
| Manager () | |
| Construct a new Manager object. More... | |
| virtual | ~Manager () |
| Destroy the Manager object. More... | |
| bool | StartDiscovery (RtpsParticipant *participant) |
| Startup topology discovery. More... | |
| void | StopDiscovery () |
| Stop topology discovery. More... | |
| virtual void | Shutdown () |
| Shutdown module. More... | |
| bool | Join (const RoleAttributes &attr, RoleType role, bool need_publish=true) |
| Join the topology. More... | |
| bool | Leave (const RoleAttributes &attr, RoleType role) |
| Leave the topology. More... | |
| ChangeConnection | AddChangeListener (const ChangeFunc &func) |
| Add topology change listener, when topology changed, func will be called. More... | |
| void | RemoveChangeListener (const ChangeConnection &conn) |
| Remove our listener for topology change. More... | |
Friends | |
| class | TopologyManager |
Additional Inherited Members | |
| Protected Member Functions inherited from apollo::cyber::service_discovery::Manager | |
| bool | CreatePublisher (RtpsParticipant *participant) |
| bool | CreateSubscriber (RtpsParticipant *participant) |
| virtual bool | NeedPublish (const ChangeMsg &msg) const |
| void | Convert (const RoleAttributes &attr, RoleType role, OperateType opt, ChangeMsg *msg) |
| void | Notify (const ChangeMsg &msg) |
| bool | Publish (const ChangeMsg &msg) |
| void | OnRemoteChange (const std::string &msg_str) |
| bool | IsFromSameProcess (const ChangeMsg &msg) |
| Protected Attributes inherited from apollo::cyber::service_discovery::Manager | |
| std::atomic< bool > | is_shutdown_ |
| std::atomic< bool > | is_discovery_started_ |
| int | allowed_role_ |
| ChangeType | change_type_ |
| std::string | host_name_ |
| int | process_id_ |
| std::string | channel_name_ |
| eprosima::fastrtps::Publisher * | publisher_ |
| std::mutex | lock_ |
| eprosima::fastrtps::Subscriber * | subscriber_ |
| SubscriberListener * | listener_ |
| ChangeSignal | signal_ |
Detailed Description
Member Typedef Documentation
◆ NodeWarehouse
◆ RoleAttrVec
| using apollo::cyber::service_discovery::NodeManager::RoleAttrVec = std::vector<RoleAttributes> |
Constructor & Destructor Documentation
◆ NodeManager()
◆ ~NodeManager()
|
virtual |
Member Function Documentation
◆ GetNodes()
| void apollo::cyber::service_discovery::NodeManager::GetNodes | ( | RoleAttrVec * | nodes | ) |
Get the Nodes object.
- Parameters
-
nodes result RoleAttr vector
◆ HasNode()
| bool apollo::cyber::service_discovery::NodeManager::HasNode | ( | const std::string & | node_name | ) |
Checkout whether we have node_name in topology.
- Parameters
-
node_name Node's name we want to inquire
- Returns
- true if this node found
- false if this node not exits
Friends And Related Function Documentation
◆ TopologyManager
|
friend |
The documentation for this class was generated from the following file:
- cyber/service_discovery/specific_manager/node_manager.h
