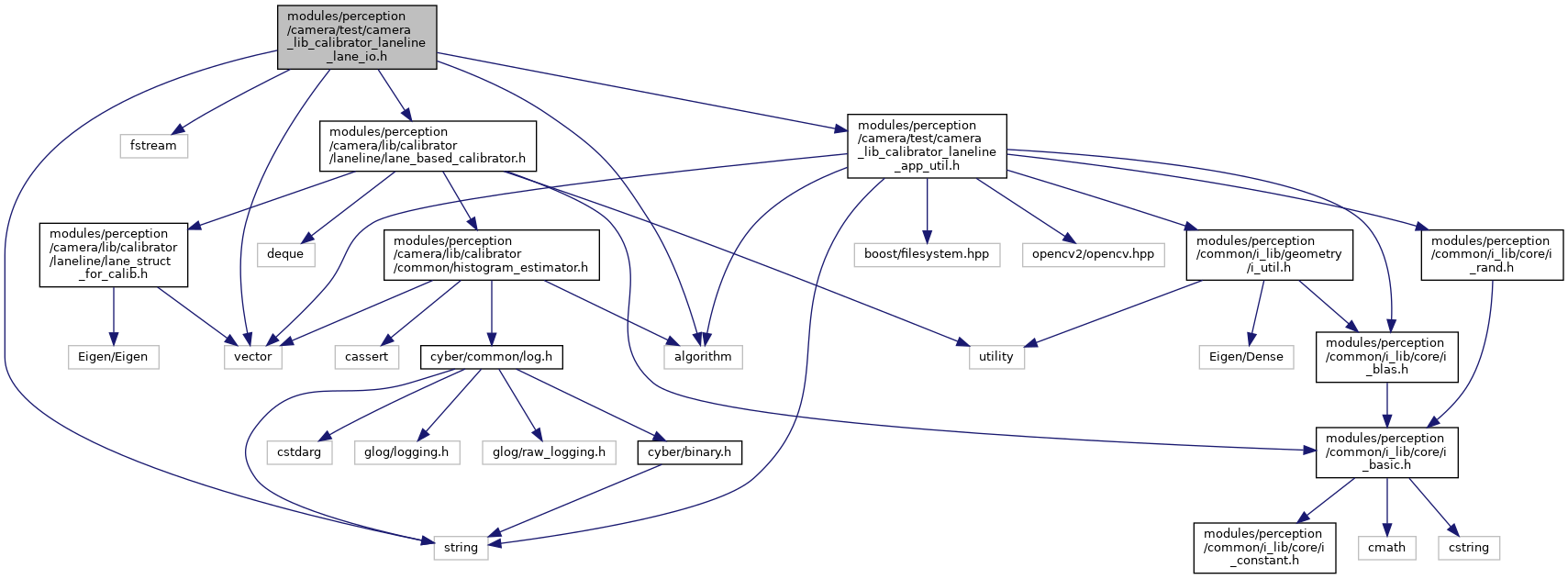
#include <algorithm>#include <fstream>#include <string>#include <vector>#include "modules/perception/camera/lib/calibrator/laneline/lane_based_calibrator.h"#include "modules/perception/camera/test/camera_lib_calibrator_laneline_app_util.h"
Include dependency graph for camera_lib_calibrator_laneline_lane_io.h:
Go to the source code of this file.
Namespaces | |
| apollo | |
| PlanningContext is the runtime context in planning. It is persistent across multiple frames. | |
| apollo::perception | |
| apollo::perception | |
| apollo::perception::camera | |
Functions | |
| bool | apollo::perception::camera::ParseOneLaneLine (const std::string &s, LaneLine *lane_line) |
| bool | apollo::perception::camera::LoadLaneDet (const std::string &filename, EgoLane *ego_lane) |
| std::vector< std::string > | apollo::perception::camera::Split (const std::string &s, const std::string &separator) |
| bool | apollo::perception::camera::LoadCamera2WorldTfs (const std::string &filename, std::vector< std::string > *frame_list, std::vector< double > *time_stamps, std::vector< Eigen::Matrix4d > *camera2world) |
