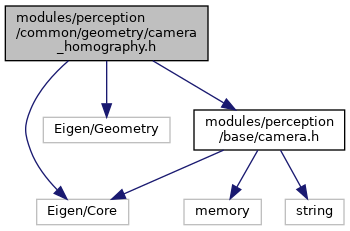
Include dependency graph for camera_homography.h:
Go to the source code of this file.
Namespaces | |
| apollo | |
| PlanningContext is the runtime context in planning. It is persistent across multiple frames. | |
| apollo::perception | |
| apollo::perception | |
| apollo::perception::common | |
Functions | |
| bool | apollo::perception::common::PointCamera1ToCamera2 (const Eigen::Vector2d &point, const Eigen::Matrix3d &camera1_intrinsic_inverse, const Eigen::Matrix3d &camera2_intrinsic, const Eigen::Matrix3d &trans_camera1_to_camera2, Eigen::Vector2d *point_out) |
| bool | apollo::perception::common::IsCamerasFieldOverlap (const base::PinholeCameraModel &from_camera, const base::PinholeCameraModel &to_camera, const Eigen::Matrix4d &extrinsic, Eigen::Vector2d *up_left, Eigen::Vector2d *low_right) |
