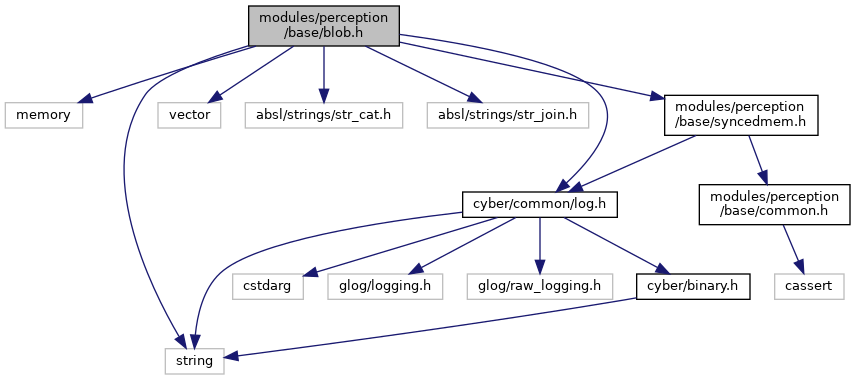
#include <memory>#include <string>#include <vector>#include "absl/strings/str_cat.h"#include "absl/strings/str_join.h"#include "cyber/common/log.h"#include "modules/perception/base/syncedmem.h"
Include dependency graph for blob.h:
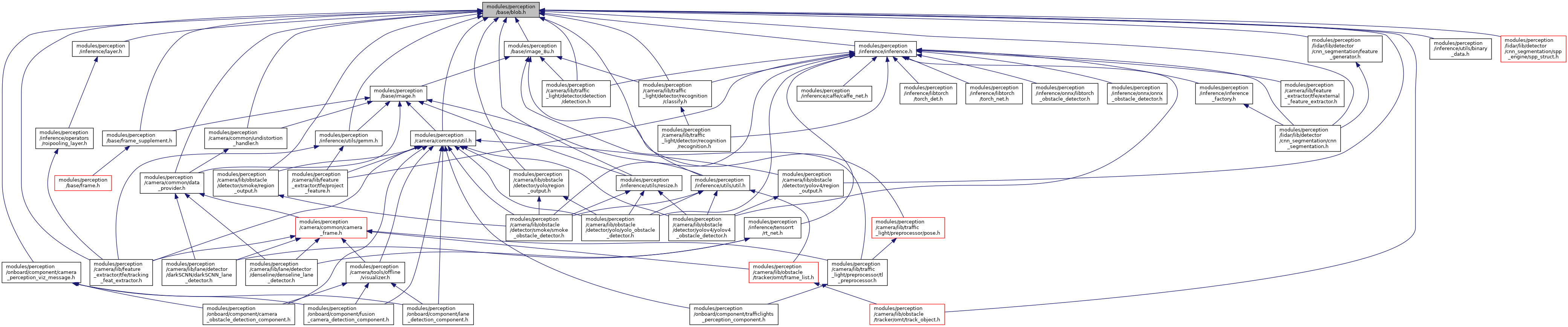
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| class | apollo::perception::base::Blob< Dtype > |
| A wrapper around SyncedMemory holders serving as the basic computational unit for images, feature maps, etc. More... | |
Namespaces | |
| apollo | |
| PlanningContext is the runtime context in planning. It is persistent across multiple frames. | |
| apollo::perception | |
| apollo::perception | |
| apollo::perception::base | |
Typedefs | |
| template<typename Dtype > | |
| using | apollo::perception::base::BlobPtr = std::shared_ptr< Blob< Dtype > > |
| template<typename Dtype > | |
| using | apollo::perception::base::BlobConstPtr = std::shared_ptr< const Blob< Dtype > > |
Variables | |
| constexpr size_t | apollo::perception::base::kMaxBlobAxes = 32 |
