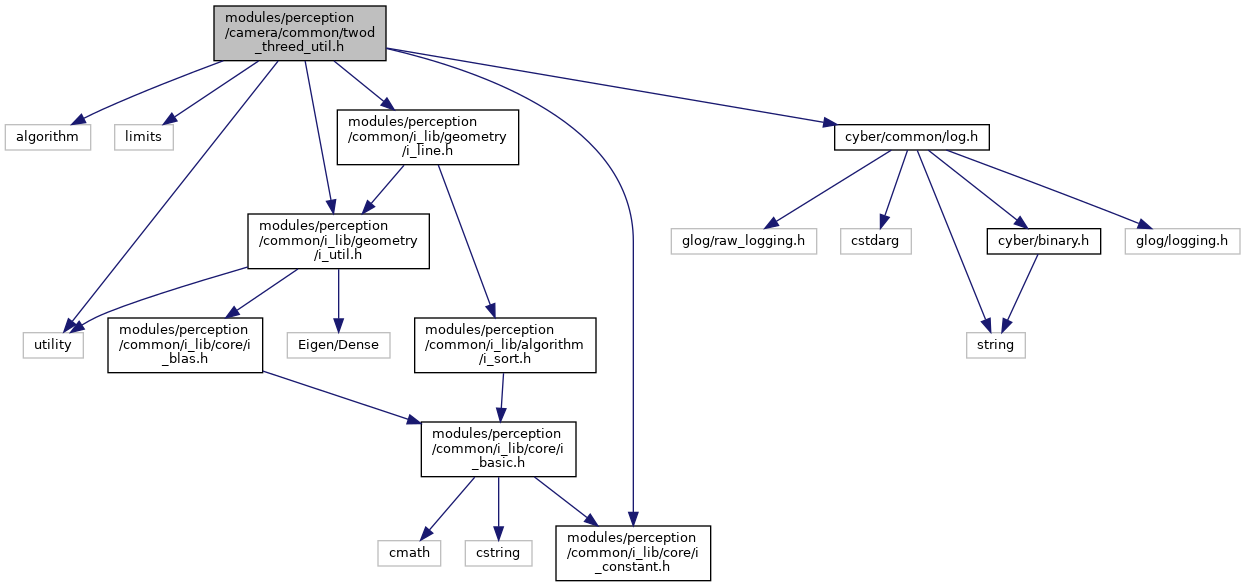
#include <algorithm>#include <limits>#include <utility>#include "cyber/common/log.h"#include "modules/perception/common/i_lib/core/i_constant.h"#include "modules/perception/common/i_lib/geometry/i_line.h"#include "modules/perception/common/i_lib/geometry/i_util.h"
Include dependency graph for twod_threed_util.h:
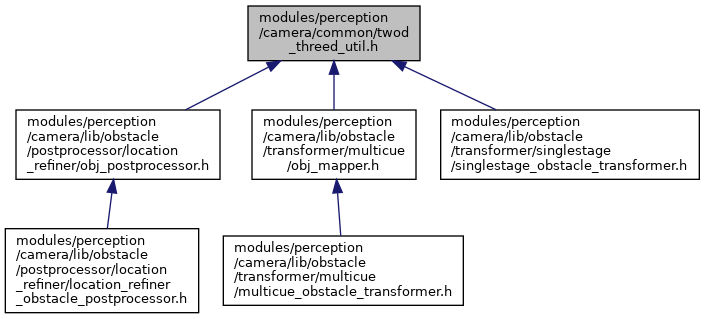
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| struct | apollo::perception::camera::LineSegment2D< T > |
Namespaces | |
| apollo | |
| PlanningContext is the runtime context in planning. It is persistent across multiple frames. | |
| apollo::perception | |
| apollo::perception | |
| apollo::perception::camera | |
Functions | |
| template<typename T > | |
| T | apollo::perception::camera::CalAngleDiff (const T a1, const T a2) |
| template<typename T > | |
| T | apollo::perception::camera::GetSharpAngle (const T &a, const T &b) |
| template<typename T > | |
| T | apollo::perception::camera::GetJaccardIndex (const T *bbox_ref, const T &x_min, const T &y_min, const T &x_max, const T &y_max) |
| template<typename T > | |
| void | apollo::perception::camera::GenRotMatrix (const T &ry, T *rot) |
| template<typename T > | |
| void | apollo::perception::camera::GenCorners (T h, T w, T l, T *x_cor, T *y_cor, T *z_cor) |
| template<typename T > | |
| bool | apollo::perception::camera::Occlude (const T *bbox1, const T &h1, const T *bbox2, const T &h2) |
| template<typename T > | |
| void | apollo::perception::camera::GetBboxFromPts (const T *pts, const int &n, T *bbox) |
| template<typename T > | |
| int | apollo::perception::camera::GetMinIndexVec (const T *vec, const int &n) |
| template<typename T > | |
| T | apollo::perception::camera::GetScoreViaRotDimensionCenter (const T *k_mat, int width, int height, const T *bbox, const T *rot, const T *hwl, const T *location, const bool &check_truncation, T *bbox_res=nullptr, T *bbox_near=nullptr) |
| template<typename T > | |
| bool | apollo::perception::camera::CheckXY (const T &x, const T &y, int width, int height) |
| template<typename T > | |
| void | apollo::perception::camera::UpdateOffsetZ (T x_start, T z_start, T x_end, T z_end, const std::pair< T, T > &range, T *z_offset) |
| template<typename T > | |
| void | apollo::perception::camera::GetDxDzForCenterFromGroundLineSeg (const LineSegment2D< T > &ls, const T *plane, const T *pts_c, const T *k_mat, int width, int height, T ratio_x_over_z, T *dx_dz, bool check_lowerbound=true) |
