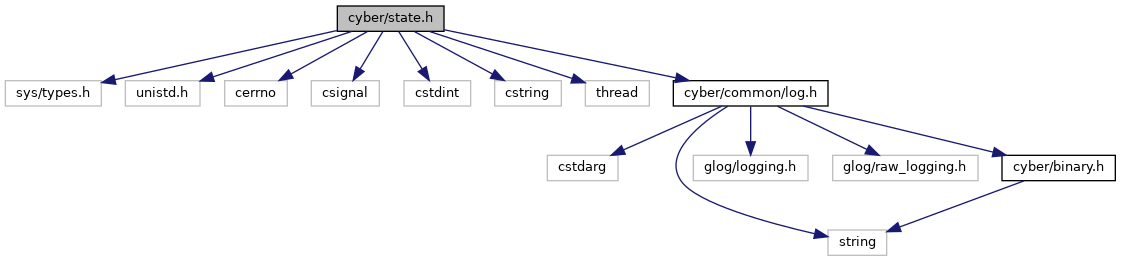
#include <sys/types.h>#include <unistd.h>#include <cerrno>#include <csignal>#include <cstdint>#include <cstring>#include <thread>#include "cyber/common/log.h"
Include dependency graph for state.h:
This graph shows which files directly or indirectly include this file:

Go to the source code of this file.
Namespaces | |
| apollo | |
| PlanningContext is the runtime context in planning. It is persistent across multiple frames. | |
| apollo::cyber | |
Enumerations | |
| enum | apollo::cyber::State : std::uint8_t { apollo::cyber::STATE_UNINITIALIZED = 0, apollo::cyber::STATE_INITIALIZED, apollo::cyber::STATE_SHUTTING_DOWN, apollo::cyber::STATE_SHUTDOWN } |
Functions | |
| State | apollo::cyber::GetState () |
| void | apollo::cyber::SetState (const State &state) |
| bool | apollo::cyber::OK () |
| bool | apollo::cyber::IsShutdown () |
| void | apollo::cyber::WaitForShutdown () |
| void | apollo::cyber::AsyncShutdown () |
