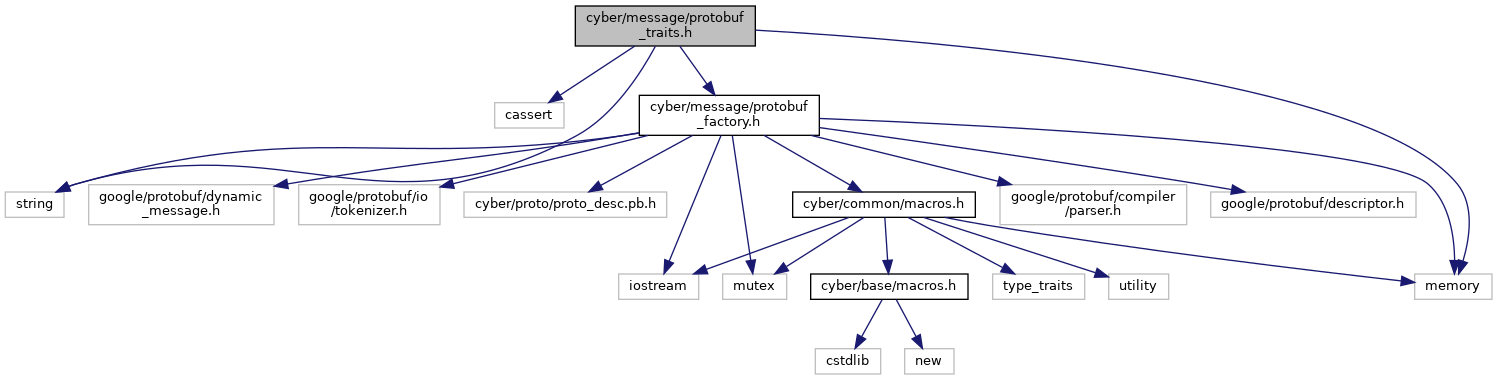
Include dependency graph for protobuf_traits.h:
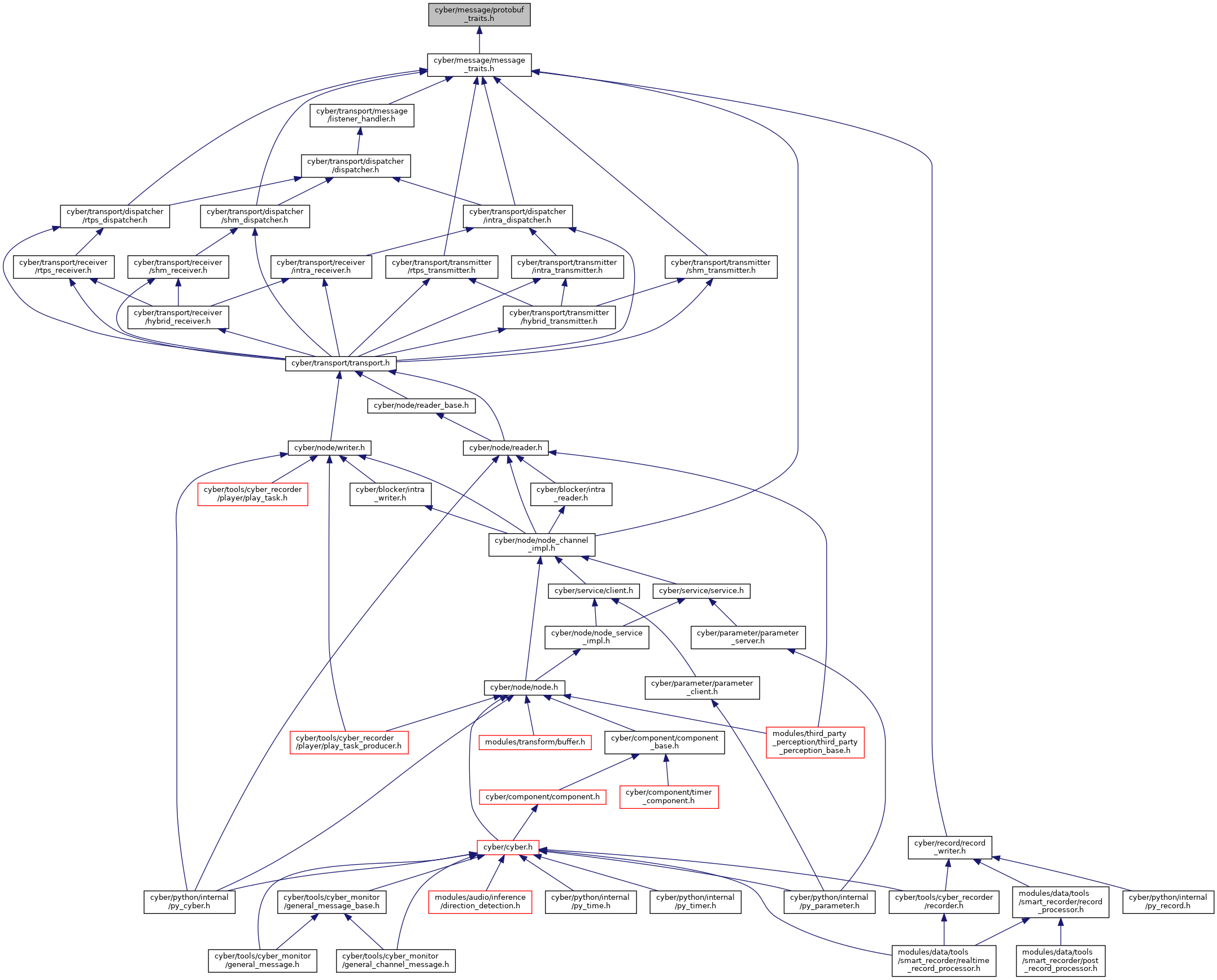
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Namespaces | |
| apollo | |
| PlanningContext is the runtime context in planning. It is persistent across multiple frames. | |
| apollo::cyber | |
Functions | |
| template<typename T , typename std::enable_if< HasType< T >::value &&!std::is_member_function_pointer< decltype(&T::TypeName)>::value, bool >::type = 0> | |
| std::string | apollo::cyber::message::MessageType () |
| template<typename MessageT , typename std::enable_if< std::is_base_of< google::protobuf::Message, MessageT >::value, int >::type = 0> | |
| std::string | apollo::cyber::message::MessageType (const MessageT &message) |
| template<typename MessageT , typename std::enable_if< !std::is_base_of< google::protobuf::Message, MessageT >::value, int >::type = 0> | |
| void | apollo::cyber::message::GetDescriptorString (const MessageT &message, std::string *desc_str) |
| template<typename T , typename std::enable_if< HasGetDescriptorString< T >::value, bool >::type = 0> | |
| void | apollo::cyber::message::GetDescriptorString (const std::string &type, std::string *desc_str) |
| template<typename MessageT , typename std::enable_if< std::is_base_of< google::protobuf::Message, MessageT >::value, int >::type = 0> | |
| bool | apollo::cyber::message::RegisterMessage (const MessageT &message) |
