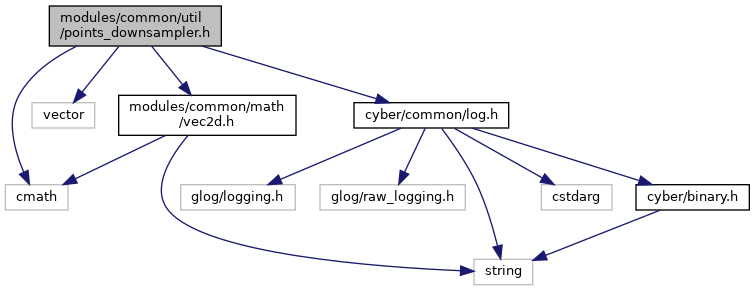
#include <cmath>#include <vector>#include "cyber/common/log.h"#include "modules/common/math/vec2d.h"
Include dependency graph for points_downsampler.h:
Go to the source code of this file.
Namespaces | |
| apollo::common::util | |
| apollo::common::util | |
| apollo | |
| PlanningContext is the runtime context in planning. It is persistent across multiple frames. | |
| apollo::common | |
| apollo::common | |
Functions | |
| template<typename Points > | |
| double | apollo::common::util::GetPathAngle (const Points &points, const size_t start, const size_t end) |
| Calculate the angle between the directions of two points on the path. More... | |
| template<typename Points > | |
| std::vector< size_t > | apollo::common::util::DownsampleByAngle (const Points &points, const double angle_threshold) |
| Downsample the points on the path according to the angle. More... | |
| template<typename Points > | |
| std::vector< size_t > | apollo::common::util::DownsampleByDistance (const Points &points, int downsampleDistance, int steepTurnDownsampleDistance) |
| Downsample the points on the path based on distance. More... | |
