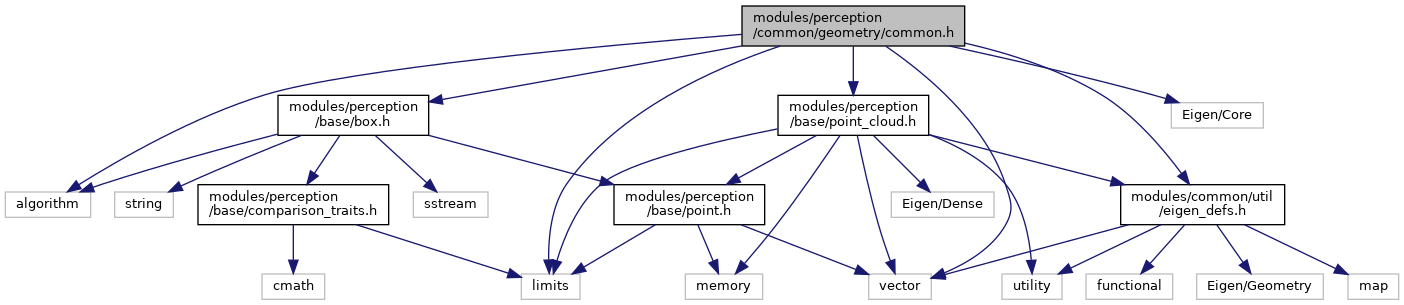
#include <algorithm>#include <limits>#include <vector>#include "Eigen/Core"#include "modules/common/util/eigen_defs.h"#include "modules/perception/base/box.h"#include "modules/perception/base/point_cloud.h"
Include dependency graph for common.h:
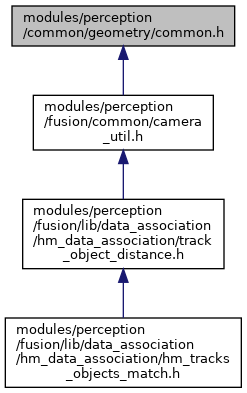
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Namespaces | |
| apollo | |
| PlanningContext is the runtime context in planning. It is persistent across multiple frames. | |
| apollo::perception | |
| apollo::perception | |
| apollo::perception::common | |
Functions | |
| template<typename PointT > | |
| bool | apollo::perception::common::IsPointXYInPolygon2DXY (const PointT &point, const base::PointCloud< PointT > &polygon) |
| template<typename PointT > | |
| bool | apollo::perception::common::IsPointInBBox (const Eigen::Matrix< typename PointT::Type, 3, 1 > &gnd_c, const Eigen::Matrix< typename PointT::Type, 3, 1 > &dir_x, const Eigen::Matrix< typename PointT::Type, 3, 1 > &dir_y, const Eigen::Matrix< typename PointT::Type, 3, 1 > &dir_z, const Eigen::Matrix< typename PointT::Type, 3, 1 > &size, const PointT &point) |
| template<typename PointCloudT > | |
| void | apollo::perception::common::CalculateBBoxSizeCenter2DXY (const PointCloudT &cloud, const Eigen::Vector3f &dir, Eigen::Vector3f *size, Eigen::Vector3d *center, float minimum_edge_length=std::numeric_limits< float >::epsilon()) |
| template<typename Type > | |
| void | apollo::perception::common::CalculateMostConsistentBBoxDir2DXY (const Eigen::Matrix< Type, 3, 1 > &prev_dir, Eigen::Matrix< Type, 3, 1 > *curr_dir) |
| template<typename Type > | |
| Type | apollo::perception::common::CalculateIou2DXY (const Eigen::Matrix< Type, 3, 1 > ¢er0, const Eigen::Matrix< Type, 3, 1 > &size0, const Eigen::Matrix< Type, 3, 1 > ¢er1, const Eigen::Matrix< Type, 3, 1 > &size1) |
| template<typename Type > | |
| Type | apollo::perception::common::CalculateIOUBBox (const base::BBox2D< Type > &box1, const base::BBox2D< Type > &box2) |
| template<typename PointT > | |
| bool | apollo::perception::common::CalculateDistAndDirToSegs (const Eigen::Matrix< typename PointT::Type, 3, 1 > &pt, const base::PointCloud< PointT > &segs, typename PointT::Type *dist, Eigen::Matrix< typename PointT::Type, 3, 1 > *dir) |
| template<typename PointT > | |
| void | apollo::perception::common::CalculateDistAndDirToBoundary (const Eigen::Matrix< typename PointT::Type, 3, 1 > &pt, const base::PointCloud< PointT > &left_boundary, const base::PointCloud< PointT > &right_boundary, typename PointT::Type *dist, Eigen::Matrix< typename PointT::Type, 3, 1 > *dir) |
| template<typename PointT > | |
| void | apollo::perception::common::CalculateDistAndDirToBoundary (const Eigen::Matrix< typename PointT::Type, 3, 1 > &pt, const apollo::common::EigenVector< base::PointCloud< PointT >> &left_boundary, const apollo::common::EigenVector< base::PointCloud< PointT >> &right_boundary, typename PointT::Type *dist, Eigen::Matrix< typename PointT::Type, 3, 1 > *dir) |
