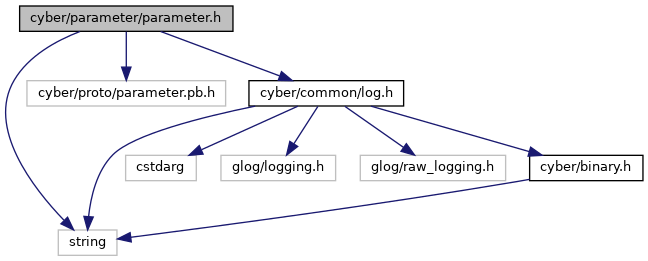
Include dependency graph for parameter.h:
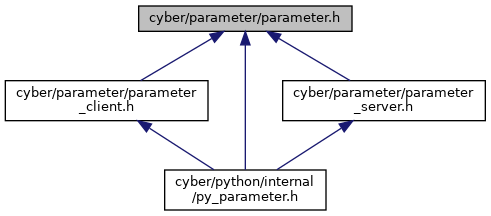
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| class | apollo::cyber::Parameter |
A Parameter holds an apollo::cyber::proto::Param, It's more human-readable, you can use basic-value type and Protobuf values to construct a paramter. Parameter is identified by their name, and you can get Parameter content by call value() More... | |
Namespaces | |
| cyber::parameter | |
| apollo | |
| PlanningContext is the runtime context in planning. It is persistent across multiple frames. | |
| apollo::cyber | |
