#include <algorithm>#include <fstream>#include <memory>#include <numeric>#include <string>#include <vector>#include "cyber/common/log.h"#include "modules/perception/base/blob.h"#include "modules/perception/base/image.h"#include "modules/perception/base/object.h"#include "modules/perception/base/object_types.h"
Include dependency graph for util.h:
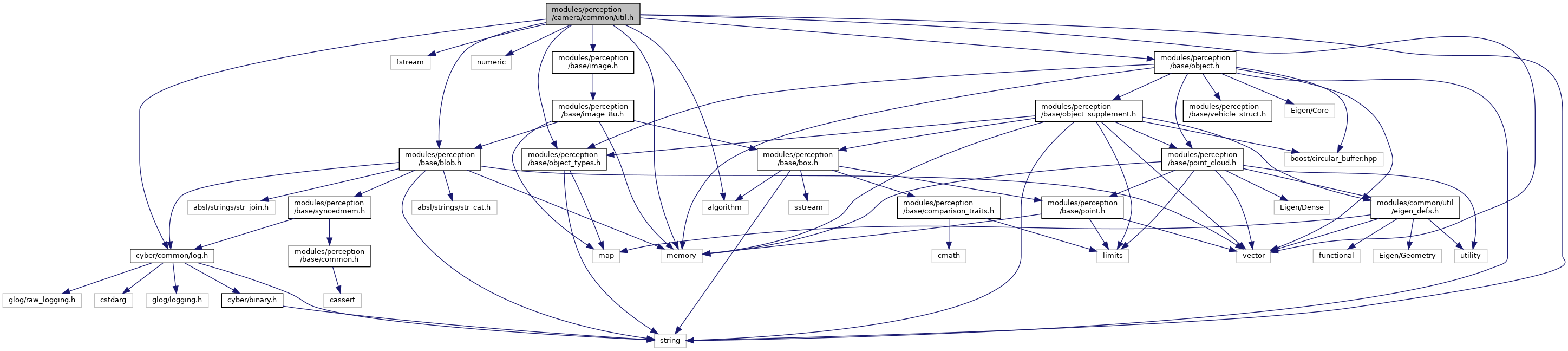
This graph shows which files directly or indirectly include this file:

Go to the source code of this file.
Namespaces | |
| apollo | |
| PlanningContext is the runtime context in planning. It is persistent across multiple frames. | |
| apollo::perception | |
| apollo::perception | |
| apollo::perception::camera | |
Functions | |
| bool | apollo::perception::camera::Equal (float x, float target, float eps=1e-6f) |
| bool | apollo::perception::camera::Equal (double x, double target, double eps=1e-6) |
| template<typename T > | |
| bool | apollo::perception::camera::IsCovered (const base::Rect< T > &rect1, const base::Rect< T > &rect2, float thresh) |
| template<typename T > | |
| bool | apollo::perception::camera::IsCoveredHorizon (const base::Rect< T > &rect1, const base::Rect< T > &rect2, float thresh) |
| template<typename T > | |
| bool | apollo::perception::camera::IsCoveredVertical (const base::Rect< T > &rect1, const base::Rect< T > &rect2, float thresh) |
| template<typename T > | |
| bool | apollo::perception::camera::Contain (const std::vector< T > &array, const T &element) |
| template<typename T > | |
| bool | apollo::perception::camera::OutOfValidRegion (const base::BBox2D< T > box, const T width, const T height, const T border_size=0) |
| template<typename T > | |
| bool | apollo::perception::camera::OutOfValidRegion (const base::Rect< T > rect, const T width, const T height, const T border_size=0) |
| template<typename T > | |
| void | apollo::perception::camera::RefineBox (const base::Rect< T > &box_in, const T width, const T height, base::Rect< T > *box_out) |
| template<typename T > | |
| void | apollo::perception::camera::RefineBox (const base::BBox2D< T > &box_in, const T width, const T height, base::BBox2D< T > *box_out) |
| bool | apollo::perception::camera::LoadAnchors (const std::string &path, std::vector< float > *anchors) |
| bool | apollo::perception::camera::LoadTypes (const std::string &path, std::vector< base::ObjectSubType > *types) |
| bool | apollo::perception::camera::LoadExpand (const std::string &path, std::vector< float > *expands) |
| bool | apollo::perception::camera::ResizeCPU (const base::Blob< uint8_t > &src_gpu, std::shared_ptr< base::Blob< float >> dst, int stepwidth, int start_axis) |
| std::string | apollo::perception::camera::GetCyberWorkRoot () |
| void | apollo::perception::camera::FillObjectPolygonFromBBox3D (base::Object *object_ptr) |
| template<typename T > | |
| void | apollo::perception::camera::CalculateMeanAndVariance (const std::vector< T > &data, T *mean, T *variance) |
